模糊神经网络是模糊逻辑控制和神经网络两者结合的产物。这两者单独使用时存在一定缺陷。模糊逻辑在一定的论域上具有很好的收敛性,并具有模糊量运算优势;而神经网络具有强自学习、自适应、并行运算和精确计算的能力。因此,这两者相结合可大大提高综合能力。
plc在工业控制中应用广泛,因此,功能强大,使用方便。因此,将模糊神经网络算法应用于PLC中具有实际应用价值,使PLC在机械、民用等领域广泛应用。这里提出一种基于PLC的模糊神经网络算法实现方法。
1、模糊神经网络系统结构
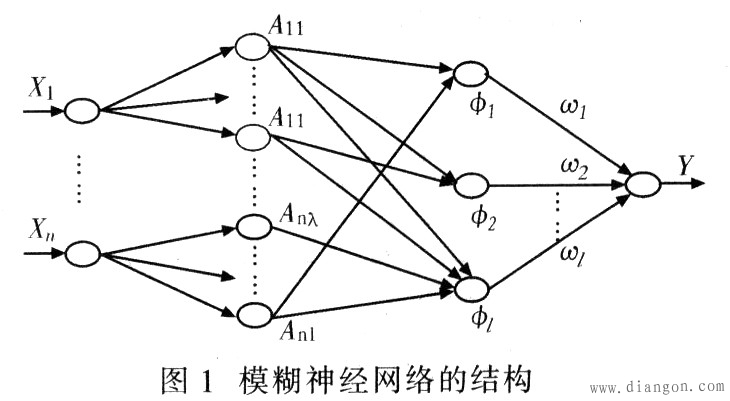
模糊神经网络具有很多种结构和算法,对于不同控制对象,综合考虑运算速度和精度,模糊神经网络结构也有所不同。由于该实现方法没有实际控制对象,为了说明在PLC上能实现模糊神经网络算法,故选择模糊神经网络,如图1所示。假设其中输入两个变量X1、X2,输出变量为Y。将每个输入因子分为:NM,NS,ZO,PS,PM等5个模糊状态。
2、模糊神经网络的学习步骤
选择在线学习,在线学习期间学习速度不变。在线学习终止条件是性能指标E小于等于某一数值。这个指标值随控制对象的改变而改变的。当确定控制对象时,该指标值可根据经验确定。但是为了便于说明问题这里设置该指标值为0.002。具体学习步骤是:①θji、σji、ωi及η的初始值在[0,1]之间随机选取,η的值为恒定值,根据经验决定。②根据模糊神经算法计算出比较理想的θji(k+1)、σji(k+1)、ωi(k+1)值。③根据模糊神经算法计算E,若E≤0.002,迭代结束。否则,令θji(k+1)、σji(k+1)、ωi(k+1)为初始值并返回②。
3、模糊神经网络算法在PLC的应用
3.1模糊神经网络学习阶段的实现
在学习阶段实现过程中,利用上位机向下位机传输样本数据,具体运算过程是由下位机实现。
3.1.1学习阶段上位机程序实现
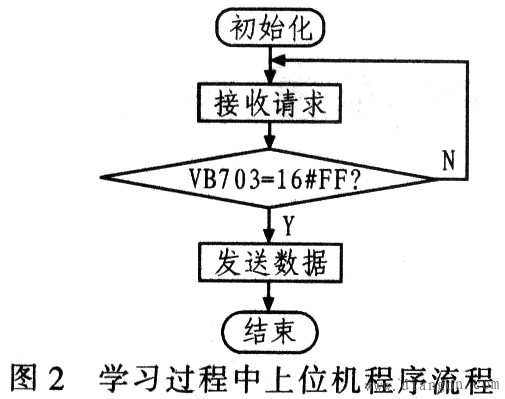
根据模糊神经网络理论知识可知,样本值是根据实际控制对象的需要而定的。为了说明问题,采用含有两个输入值和一个输出期望值的较为简单的样本值。学习过程中上位机程序设计流程如图2所示,具体过程如下:
(1)初始化初始化样本值和为后续传输样本值做准备,通过PLC指令把样本值写入PLC的储存地址,再次赋值给发送区的数据区,并把存储第一个样本值地址分别赋给VD712,VD716,VD720地址指针,这样可为再次发送样本值做准备。因为要发送的样本值是不断变化的,但是发送区不能变化,故使用地址指针达到两者同步。
(2)接受请求接收下位机向上位机传送的数据,该数据是告之上位机是否向下位机传送样本值。
(3)判断VB703数据请求标志位VB703,对所接收的数据,判断其值是否等于16#FF。而16#FF是通信协议中规定上位机给下位机传送数据的标志。如果等于16#FF,则向下位机传输数据;否则就再次返回上一步。
(4)发送数据通过上位机通信程序向下位机发送样本值,发送完后就结束第一次传送样本值,启动新接收,等待下位机请求数据传送信号。
3.1.2下位机程序实现
图3为下位机程序流程,从中可以看到学习阶段下位机程序的基本构想。

针对下位机程序流程这里需要说明的是:
(1)初始化首先随机选取[0,1]内θji、σji、ωi及η的初始值,通过PLC指令把这些值赋给存储单元;其次对学习过程中用到的常数赋值,同样赋给存储单元;最后,要把请求数据传送的标志位VB703置位。
(2)初始值计算由于初始化中请求数据传送,首先通过下位机的通信程序取得数据,并且接收样本数据后.复位VB703,告知上位机不再传送数据。接着利用初始化已赋值的第一组权值,计算第一组样本值为输入时输出值、输出值与期望输出值的差值以及后续计算所要用到的数据。
(3)权值、E(性能指标)值计算在第上一步的基础上计算权值和E值。具体算法可参考模糊神经网络算法.且易于在PLC平台上实现。
(4)E值判断把计算的E值与0.002相比较。如果E≤0.002,说明计算的函数变量、权值已达到预期目标,学习过程结束。结束的同时触发外接设备的开关量,利用外接设备读取这些计算结果。相反,则需继续学习过程。并将不满足性能指标第3步计算出的函数变量、权值赋给下一步重新计算y值所需的地址内,把请求数据标志位VB703置位.并向上位机发送,从而为新y值的计算做好准备。
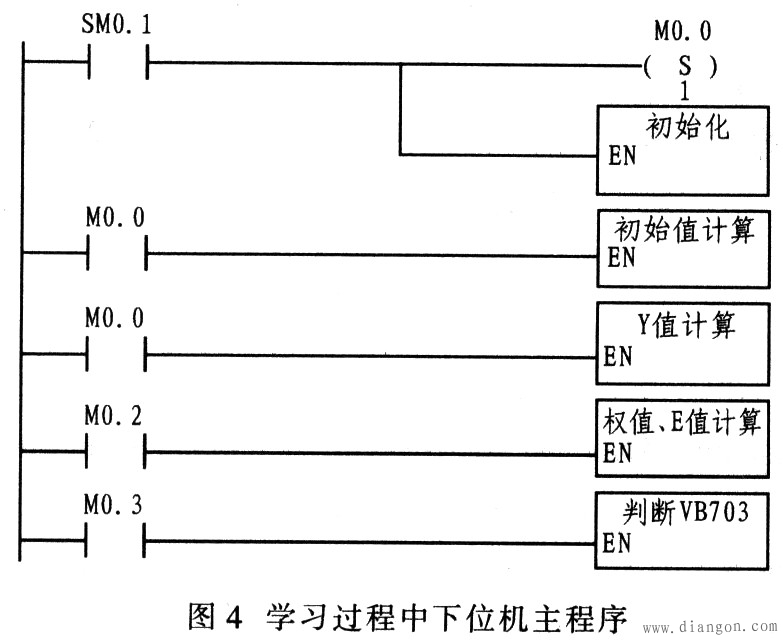
(5)学习过程中Y值计算由于已把请求数据标志位置位,因此,首先通过通信程序先取样本,取完样本值后复位VB703,告知上位机不再传样本值,接着计算新的Y值,以便计算新的函数变量、权值以及E值。学习过程下位机主程序实现如图4所示。
3.2模糊神经网络现场工作过程实现
当学习阶段结束后,通过现场采集数据,建立数据库并把采集的数据当做输人,运用训练好的权值和模糊神经网络算法,得到控制对象所需的控制值。要实现以上工作步骤。仍然需要上下位机合作,故而程序设计分为上位机和下位机两部分。
3.2.1上位机程序实现
现场工作中上位机程序设计功能与学习阶段相一致,主要区别;在学习阶段初始化的和需要给下位机传送的样本值变成了通过外接设备现场采集到的数值。在PLC程序的初始化中,把采集值从外接设备的地址中赋值到发送区的数据区。(http://www.ippipp.com/版权所有)因为采集值是在一定的周期内变化的,所以是实时的。故无需地址指针使两者工作同步。
3.2.2下位机程序实现
由图5现场工作过程中下位机程序流程可知.下位机在现场工作过程中的具体步骤:
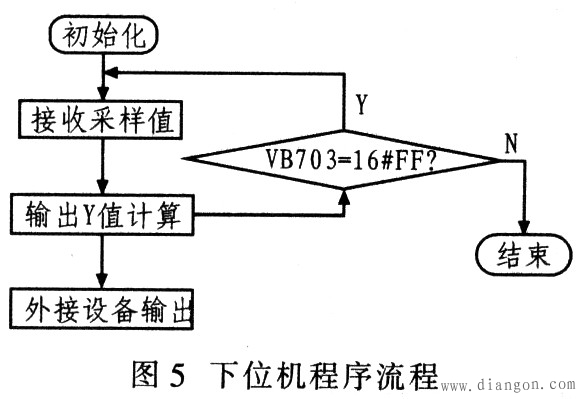
(1)初始化下位机初始化首先要把学习过程训练好的θji、σji、η的值,通过PLc指令把其赋给存储单元;其次要对后续Y值计算过程中用到的常数赋值,同样也要赋给存储单元;最后,要把请求数据传送的标志位VB703置位。并发送给上位机。
(2)接收采集值 首先接收上位机的采集值,接着把采集的值赋给即将进行Y值运算的储存地址。同时将请求数据传输标志位VB703复位,并传送给上位机,要求停止继续向下位机传输采集值。
(3)输出y值计算利用上一步提供的采集数据、初始化步骤中的权值和模糊神经网络算法,以PLC为平台进行计算,将计算所得值赋给外接输出设备的存储地址.同时根据现场情况控制请求数据接收标志位VB703是否置位。
(4)VB703判断若VB703=16#FF,那么启动新的数据接收,即跳转到第二步。如果VB703≠16#FF,则跳转到结束。但要知道的是这两种结果是工作人员根据现场情况在第3步中已确定的。现场工作过程中下位机主程序实现如图6所示。

4、结论
通过对模糊神经网络学习过程和现场工作过程的PLC程序的仿真,结果表明:学习过程的PLC程序,利用模糊神经网络自学习能力,当不满足性能指标时,系统则根据梯度下降策略自动的调整权值、隶属函数的和,直到输出满足要求为止。现场工作过程PLC程序,在采集值确定情况下.能够得出确定的输出值,达到预期效果。