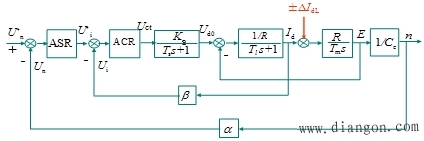
| 一、双闭环直流调速系统动态数学模型 在单闭环直流调速系统动态数学模型的基础上,考虑双闭环控制的结构,即可绘出双闭环直流调速系统的动态结构图。其中,转速调节器和电流调节器的传递函数W ASR(s)和W ACR(s)均采用PI调节器: |
 |
| 则得系统动态结构如下图所示。 系统动态结构: |
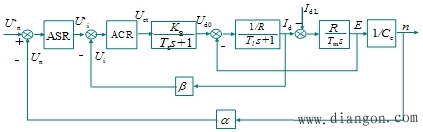 |
| 双闭环调速系统的动态结构图 |
|
二、突加给定起动过程分析 |
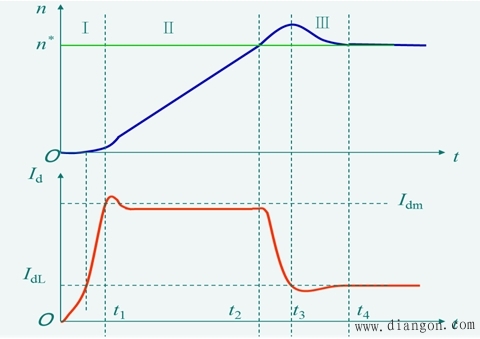 |
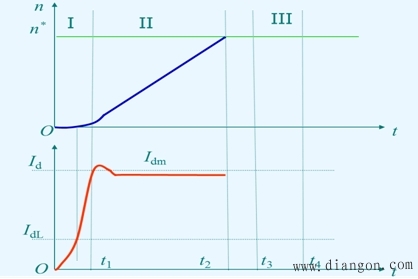
| (1)第I阶段 ASR由未饱和→饱和(0 ~ t1) —电流上升阶段 突加U n* → ΔU n=U n*-U n≈U n*很大→ASR 迅速饱和→U i*= U im* →Uct↑→Ud0↑→I d↑迅速上升。 当 I d ≥ I dL 后→n开始↑(缓慢。这由于机电惯性作用,转速不会很快增长)→ 当t=t1, I d↑≈I dm,此时ASR的输入偏差电压ΔU n的值仍较大, 保持U i= U im* 。如下图所示。 |
 |
|
本阶段:ASR由不饱和迅速饱和(U n增长慢)。 |
 |
|
ACR调节作用、ASR饱和,Uct和Udo 线性增长,Id略小于Idm。 |
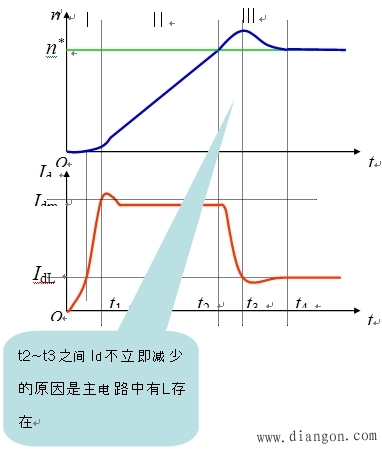 |
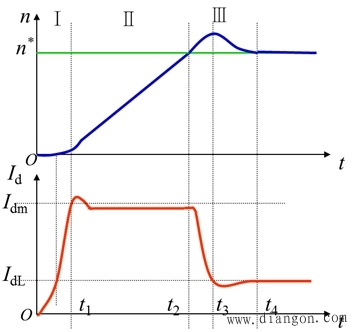
| 第 Ⅲ 阶段 (续) 当 t=t3,I d = I dL →T e= T L → dn/dt = 0,转速n才到达峰值。 此后,电动机开始在负载的阻力下(t3~t4) →I d < I dL → n ↓ |
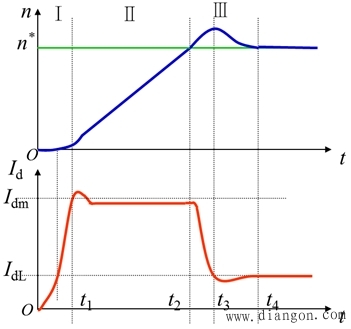 |
| 第 Ⅲ 阶段 (续) 当 t=t4,n ↓ →n* 进入稳态(如果调节器参数整定得不够好,转速n可能会经过几次振荡,但转速环会进行调节)。 U n = α n* =U n* U i*= U I = β I dL |
 |
|
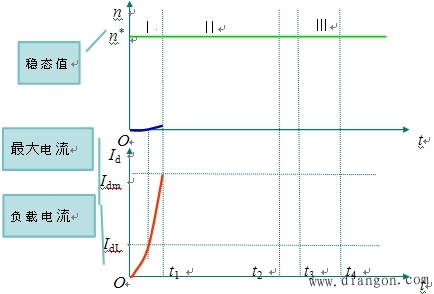
2. 双闭环调速系统的起动过程的特点 |
 |
| 直流调速系统的动态抗负载扰作用 |
| ② 抗电网电压扰动 |
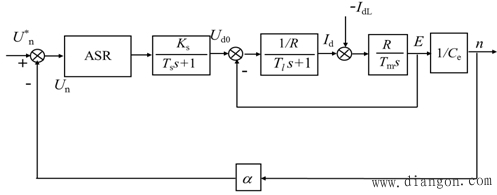 |
| 直流调速系统的动态抗扰作用 a)单闭环系统 |
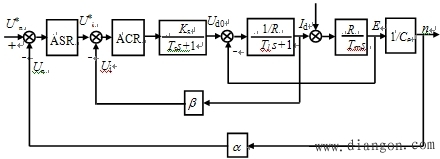 |
| b)双闭环系统 |
|
△U d—电网电压波动在整流电压上的反映 |
|
因此,电网电压扰动由电流环起调节作用。 |
导读:目前正在解读《双闭环直流调速系统的动态特性》的相关信息,《双闭环直流调速系统的动态特性》是由用户自行发布的知识型内容!下面请观看由(电工学习网 - www.9pbb.com)用户发布《双闭环直流调速系统的动态特性》的详细说明。
提醒:《双闭环直流调速系统的动态特性》最后刷新时间 2023-07-10 04:01:22,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《双闭环直流调速系统的动态特性》该内容的真实性请自行鉴别。