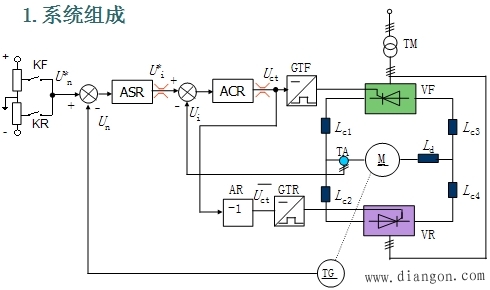
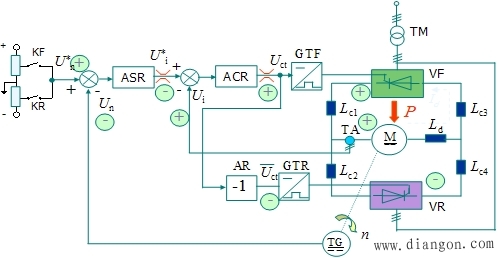
| 一、α =β 配合控制的有环流可逆调速系统 α =β 配合控制可以清除直流平均环流,但一定有瞬时脉动环流存在,所以是有环流可逆调速系统,并是自然环流,其系统原理框图如下: | |
 | |
|
① 主电路 | |
 | |
 | |
|
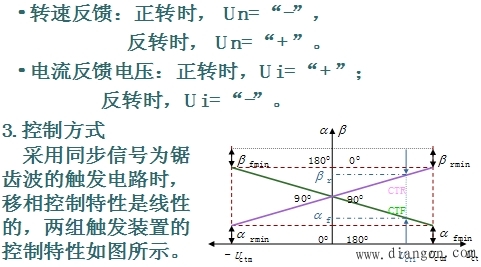
5. α =β工作制的优缺点 | |
| 零位整定: U ct=0 时 , | |
|
缺点:移相范围缩小,VT容量没有得到充分利用;起动时造成了控制死区。 | |
 | |
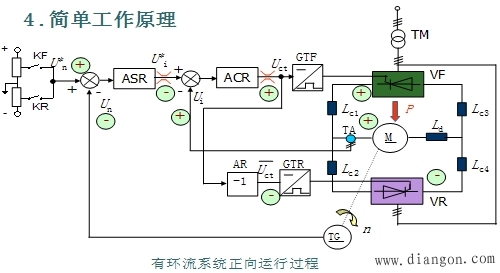
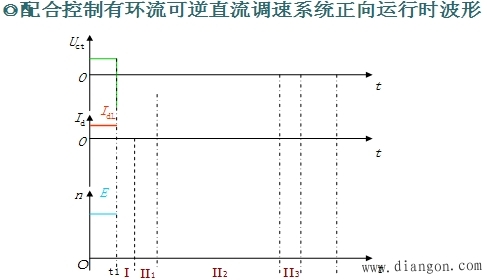
| (一)本桥逆变(电流降落 )阶段( I ) 1. 正常运行时( 0—t1 ): U *n= +,U n= -,U *i= -,U i= +, U ct=+, /U ct= - 。 则 α f < 90°VF正组整流,U dof=+; α r > 90°VR反组待逆变,U dor=+ | |
| VF正组U dof提供能量供R消耗、使 M 工作在电动状态、使 L 吸收能量 ◎有环流系统正向运行状态 | |
 | |
 | |
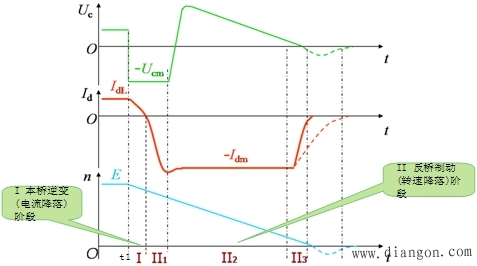
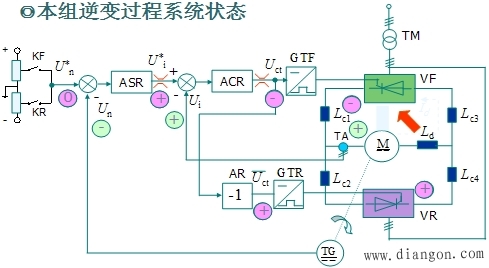
| 2. 发出停车指令后( KF↑) : U *n= 0,∵U n= -,∴ U *i= +U *im,∵U i= +,在+U *im+U i作用下, ACR输出→ -Uctm VF:β f=β min 逆变 VR:α r=α min 待整流 此时,U dof= -,n、E基本不变, Udof=IR+E+LdId/dt ∴I d迅速↓,是靠L释放能量反对I d减少,且维持Id为正。 | |
 | |
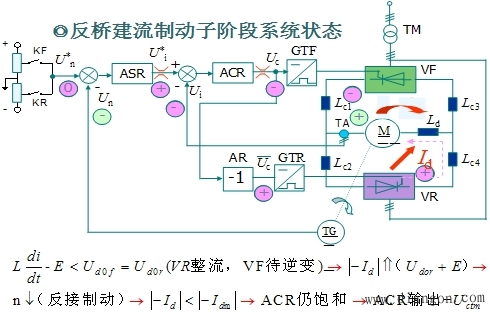
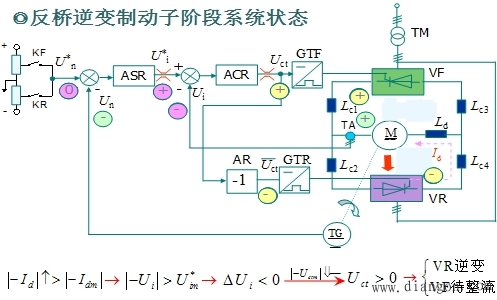
| (二)反桥制动( 转速降落 )阶段( Ⅱ ) 当主电路电流下降过零时,本组逆变终止,第 I 阶段结束,转到反组 VR 工作,开始通过反组制动。从这时起,直到制动过程结束,统称“反桥制动阶段”,这一阶段较复杂,可分成三个子阶段: ·反桥建流子阶段; ·反桥逆变子阶段; ·反桥减流子阶段。 1. 反桥建流子阶段 ( Ⅱ1 ) ① U *i= +U *im,i d=0,ACR输出: -U ctm ② -U ctm : VF — 逆变|U dof| VR —整流 |U dor| | |
| E+U dor =IdR+LdId/dt 能量被R消耗,L吸收。 -I d ↑( 迅速反向增加 ) → -I dm M:反接制动 ,n开始↓ | |
 | |
| 2. 反桥逆变子阶段( Ⅱ2 ) -I d↑→– I dm 并略有超调时,U *i= U *im<β I d U ct= +:VF —待整流状态 VR—逆变状态 此后,在ACR的调节作用下,力图维持接近最大的反向电流 – I dm ,因而 | |
  | |
| E = U dor+I dR+LdId/dt | |
| M在恒减速条件下回馈制动,把动能转换成电能,其中大部分通过 VR 逆变回馈电网,R消耗一部分。 M:发电制动状态。n↓,E↓ 要求U dor↓(以维持I d不变),则U ct↓(线性) ACR给定不变,维持恒值 这个阶段所占的时间最长,是制动过程中的主要阶段 | |
 | |
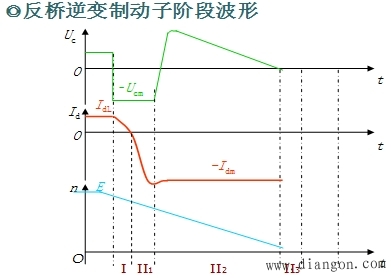 | |
| 3. 反桥减流子阶段 ( Ⅱ3 ) 由 E = U dor+I dR+LdId/dt 可知, 当U dor↓→ 0,E 继续↓,这时I d 从 – I dm↓ 最后,n=0,E=0 在电流衰减过程中,电感 L上的感应电压 LdId/dt 支持着反向电流,并释放出存储的磁能,如果电机很快停止,整个制动过程便结束了。 如果考虑到其它因素,如L存储的磁能较大,电机的转速在最后一小段时间里有一些不同情况。 | |
 | |
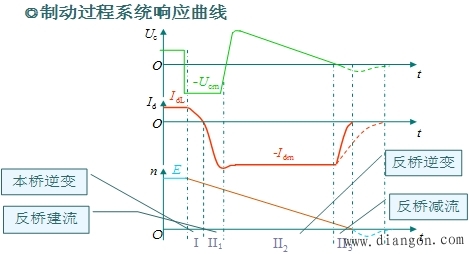 | |
| ◎各阶段的动力源 本组逆变:电感L 释放能量感应出很大的电压。 反桥制动 反桥建流:反组整流电压和电机电动势给回路提供了大的电压。 反桥逆变:ASR的输出U im*(ACR的输入)迫使电路电流维持较大值不变 反桥减流:L 中储存的能量和电机的动能在电流的急剧下减过程中释放出来。 |
导读:目前正在解读《有环流调速系统及其控制方法》的相关信息,《有环流调速系统及其控制方法》是由用户自行发布的知识型内容!下面请观看由(电工学习网 - www.9pbb.com)用户发布《有环流调速系统及其控制方法》的详细说明。
提醒:《有环流调速系统及其控制方法》最后刷新时间 2023-07-10 04:01:22,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《有环流调速系统及其控制方法》该内容的真实性请自行鉴别。