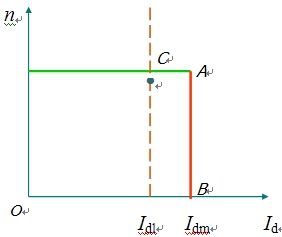
| 一、问题的提出 (单闭环调速系统的缺点) 设计的调节器的动态参数,难以保证两种调节过程都具有良好的动态品质。用 一个调节器综合了多种信号,各参数间相互影响。完成两种任务:正常负载时实现转速调节;电流超过临界值时,进行电流调节。 对扰动的抑制能力差:环内的任何扰动,只有等到转速出现偏差才能进行调节,因而转速动态降落Δn大。 电流截止负反馈环节来限制起动电流,不能充分利用电动机的过载能力获得最快的动态响应。起动过程中要等到电枢电流上升到 时,截流负反馈起作用又把电流压了下来,仅靠强烈的负反馈作用限制电流的冲击,其性能还不很令人满意(起动过程长)。 理想起动过程应该在过渡过程中始终保持电流(转矩)为允许的最大值,使电力拖动系统尽可能用最大的加速度起动,达到稳态转速后,又让电流立即降低下来,使转矩马上与负载相平衡,立即转入稳态运行 。 理想起动过程波形如右图所示。根据电力拖动系统的运动方程:Jdω/dt=Te-Tl=Cm(Id-Il),动态时要控制n,就必须控制T,也即Id。这时,起动电流呈方形波,转速按线性增长。这是在最大电流(转矩)受限制时调速系统所能获得的最快的起动过程。 |
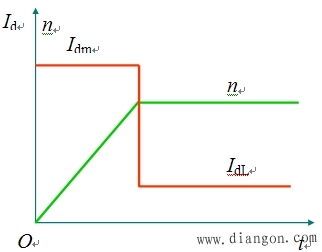 |
| 理想的快速起动过程 |
|
解决思路 |
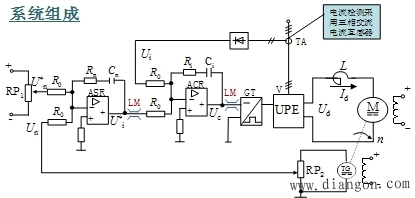 |
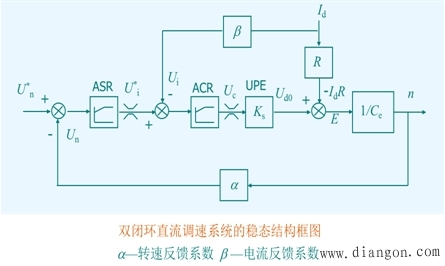
| ASR—转速调节器 ACR—电流调节器 TG—测速发电机 TA—电流互感器 V、GT—晶闸管整流、触发装置 三、稳态结构图和静特性 1.系统稳态结构框图 |
 |
|
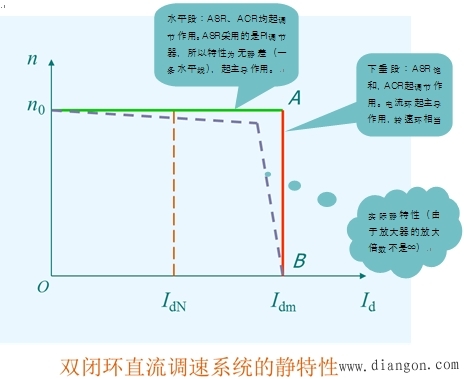
2. 系统静特性 |
|
即静特性的n0-A段(水平段) |
 |
|
② ASR饱和 |
| 上式表明:转速 n 是由 |
 |
| 给定电压U*n决定的。 |
| 表明:U*i(ASR的输出)由负载电流 I dL 决定。 |
 |
| 表明:控制电压 Uct 的大小则同时取决于 n 和 I d,或者说,同时取决于U*n 和 IdL。 以上各式说明:稳态时,PI调节器输出量与输入无关,而是由它后面环节的需要决定的。后面需要PI调节器提供多么大的输出值,它就能提供多少,直到饱和为止。它不同于P调节器的特点。比例环节的输出量总是正比于其输入量。 2. 稳态参数(α 和β )计算: 由于系统无静差,稳态时,PI调节器的输入电压为0(ΔU=0),给定电压与反馈电压相等。 (1)电流环的β ΔU i=0 , U*im=βI dm |
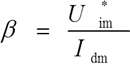 |
| 电流反馈系数 首先确定I dm(电机的过载能力、机械承受冲击力)。然后,可以选择U*im(ASR的输出限幅值),求出β 。或选择β,求U* im 。 (2)转速环的α 转速反馈系数 |
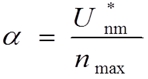 |
| n max —电动机调压时的最高转速。 U* nm —根据运算放大器允许输入电压和稳压电源的情况选定,稳压电源要留有余量。 注:双闭环调速系统的稳态参数计算与单闭环有静差系统(根据D 和 S )完全不同。 |
导读:目前正在解读《转速、电流双闭环直流调速系统及其静特性》的相关信息,《转速、电流双闭环直流调速系统及其静特性》是由用户自行发布的知识型内容!下面请观看由(电工学习网 - www.9pbb.com)用户发布《转速、电流双闭环直流调速系统及其静特性》的详细说明。
提醒:《转速、电流双闭环直流调速系统及其静特性》最后刷新时间 2023-07-10 04:01:22,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《转速、电流双闭环直流调速系统及其静特性》该内容的真实性请自行鉴别。