一、机械手的控制要求
下图表示某生产车间采用气缸控制的搬运机械手,其任务是将左工作台的工件搬运到右工作台。机械手的工作方式可分为手动、单步、单周期、连续和回原点 5 种。
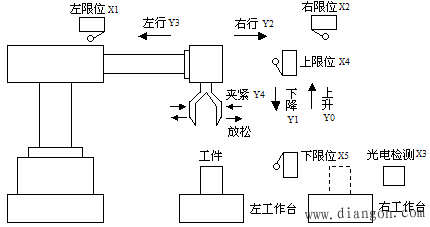
图 搬运机械手结构示意图
1 .机械手的工作方式
手动运行:用各自的按钮使各个负载单独接通或断开的方式。
回原点运行:该方式下按回原点按钮时,机械自动向原点回归。
单步运行:按一次起动按钮,前进一个工步(或工序)。
单周期运行:在原点位置按起动按钮,自动运行一个周期后再在原点停止。在中途按停止按钮时就停止运行,再按起动按钮,从断点处开始运行,完成之后回到原点自动停止。
连续运行:在原点位置按起动按钮,开始连续的反复运行。若中途按停止按钮,动作将继续到原点为止才停。
操作面板的布置如下图所示。
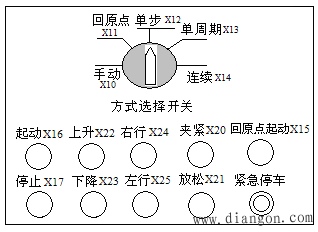
图 机械手操作盘示意图
二、机械手 I/O 分配
根据控制要求,共需要 19 个输入点、 6 个输出点。选用 FX 1N -40MR 的 plc 时, I/O 分配如下表所示。
表 I/O 分配
|
输 入 |
输 出 | ||||
|
手动开关 |
X10 |
下降按钮 |
X23 |
上升电磁阀 |
Y0 |
|
回原点开关 |
X11 |
右行按钮 |
X24 |
下降电磁阀 |
Y1 |
|
单步开关 |
X12 |
左行按钮 |
X25 |
紧 / 松电磁阀 |
Y4 |
|
单周期开关 |
X13 |
夹紧按钮 |
X20 |
右行电磁阀 |
Y2 |
|
连续开关 |
X14 |
松开按钮 |
X21 |
左行电磁阀 |
Y3 |
|
回原点起动 |
X15 |
上升限位 |
X4 |
原点指示 |
Y5 |
|
起动按钮 |
X16 |
下降限位 |
X5 |
- |
- |
|
停止按钮 |
X17 |
左限位 |
X1 |
- |
- |
|
上升按钮 |
X22 |
右限位 |
X2 |
- |
- |
|
工件检测 |
X3 |
- |
- |
- |
- |
三、程序设计
初始化指令 IST 指令专门用来设置具有多种工作方式的控制系统,其格式如下图所示,图中的源操作数 [S] 指定与工作方式有关的输入继电器的起始输入,它实际上指定从 X10 开始的 8 个输入继电器具有以下意义:
X10 :手动;
X11 :回原点;
X12 :单步运行;
X13 :单周期运行(半自动);
X14 :连续运行(全自动);
X15 :回原点起动;
X16 :自动操作起动;
X17 :停止。
目标操作数 [D1] 指定自动操作模式中,使用状态器的最小序号;目标操作数 [D2] 指定自动操作模式中,使用状态器的最大序号。因此该例自动操作模式所使用的状态器为 S20 到 S27 。
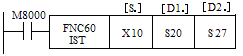
图 初始化指令的格式
IST 指令的执行条件满足时,初始状态继电器 S0 ~ S2 和下列特殊辅助继电器被自动指定为以下功能即使(以后 IST 指令的执行条件变为 OFF ,这些元件的功能仍保持不变。)
S0 :手动操作的初始状态器,当把工作方式选择开关置于 X10 时, S0 为 ON ,进入手动程序。
S1 :回原点操作的初始状态器,当把工作方式选择开关置于 X11 时, S1 为 ON ,进入自动回原点程序。
S2 :自动操作的初始状态器,把工作方式选择开关置于 X12 、 X13 或 X14 时, S2 为 ON ,进入自动程序。
机械手完整的控制程序是由初始化程序、手动程序、自动返回原点程序和自动程序组成的,其步进梯形图如下图所示。
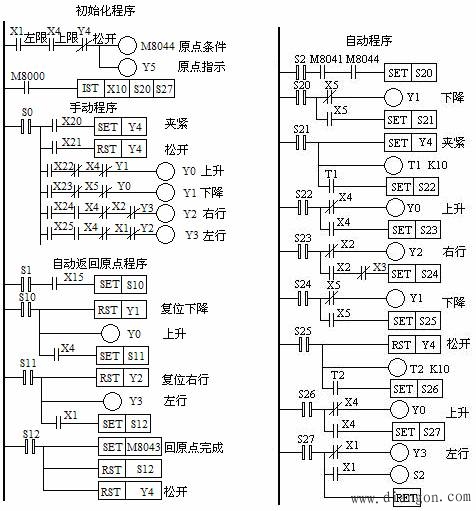
图 机械手步进梯形图(该图是手绘图)
使用 IST 指令后,系统的手动、单周期、单步、连续和回原点这几种工作方式的切换是由系统程序自动完成的,但是必须按照前述的规定,来安排 IST 指令中指定的控制工作方式用的输入继电器 X10 ~ X17 的元件号顺序。
工作方式的切换是通过特殊辅助继电器 M 8040 ~ M8042 实 现的, IST 指令自动驱动 M8040 ~ M8042 。