一、概述
gps相对定位,就是在不同观测点(站)上安置GPS接收机,同步观测相同的GPS星座,用以测定各观测站在WGS-84坐标系中的相对位置(即三维坐标增量或称为基线向量)的方法。
根据相对定位时GPS接收机所处的状态不同,相对定位可划分为静态相对定位和动态相对定位两类。
二、GPS静态相对定位
(一)GPS静态相对定位的原理方法及其应用
GPS静态相对定位的一般方法,就是将一台GPS接收机安置在已知坐标的地面点(已知点)上,另一台或多台GPS接收机安置在未知坐标的地面点(待定点)上,并保持各接收机固定不动,同步连续观测相同的GPS卫星星座,用以求得未知点相对于已知点的坐标增量(基线矢量),从而由已知点坐标,推求各未知点坐标的方法。
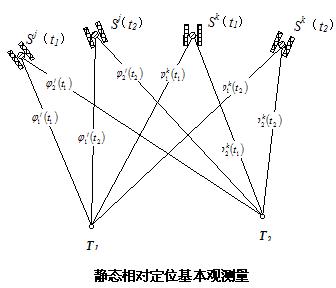
(二)静态相对定位观测方程
1、基本观测量及其差分形式
设安置于某一GPS基线两端点上的接收机Ti (i=1,2),在观测历元T1和T2对卫星Sj和Sk进行了同步观测,则可得到独立的载波相位观测量(基本观测量):
、 、
、
![]() 、
、![]() 、
、![]() 、
、![]() ;
;
 、
、 、
、 、
、 。
。
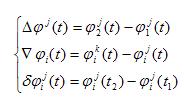
设 、
、 和
和 分别代表不同接收机之间,不同卫星之间和不同观测历元之
分别代表不同接收机之间,不同卫星之间和不同观测历元之

间的观测量之差,即
由公式(5-23)知,观测方程的一般形式为
在GPS相对定位中,常用的三种差分(线性组合)是单差(分)、双差(分)和三差(分),它们定义如下:
(1)单差(SD―Single Difference):

它是在同一观测历元下,不同测站、同步观测相同卫星的观测量之差。
(2)双差(DD―Dual Difference):
它是在一观测历元下,不同测站、同步观测一组卫星的单差之差。
(3)三差(TD―Triple Difference):
它是不同历元、不同测站、同步观测一组卫星,求得的双差之差。
2.单差观测方程
3.
式中,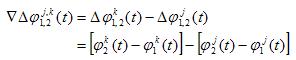 ,
,
 ,
,
 ,
,
 。
。
从上式可见,单差观测方程中,卫星钟差的影响被消除了,而两测站接收机的相对钟差(钟差之差)Δt(t),对于同一观测历元来说,与其它被测卫星组成的单差观测方程,都是相同的。又由于卫星轨道误差和大气折射误差,对同步观测的两测站具有一定的相关性,因此,在测站间求单差后,它们的影响将明显减弱,特别是对于短基线(S<20km),效果更显著。
由以上讨论可知,单差观测模型的优点是:消除了卫星钟差的影响,并明显削弱了卫星轨道误差和大气折射误差的影响,但单差观测方程个数比独立观测量方程减少一半。
3、双差观测方程
若在求单差分的基础上,再对不同卫星Sj、S k求差,便可得到双差观测方程。可得:

式中

由双差观测方程可见,接收机相对钟差Δt(t)被消除了,这是双差观测模型的重要优点。因为GPS接收机使用稳定性较差的石英钟,它难以用模型表示。如果将每个观测历元的接收机钟差都作为未知数求解,则将使解算基线向量的法方程中的未知数个数大大增加。使用双差模型后,接收机钟差的影响被消除了,它既不涉及钟差模型,又使法方程中未知数个数大大减少,很方便地解决了GPS数据处理中一个棘手的问题。所以,几乎所有的GPS基线解算软件,都使用双差观测模型。但双差观测模型的方程个数比单差模型减少,对解算精度可能造成不利影响。
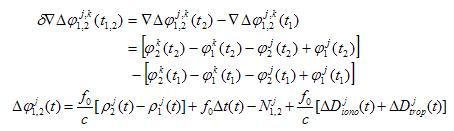
4、三差观测方程

所谓“三差”,就是在“双差”的基础上,再对两个不同观测历元t1和t2求差:
由三差观测方程可知,求三差后,观测方程中不再包含整周未知数Ni(t0)和Nk(t0),这是三差模型的优点,但三差观测方程的个数比双差模型又进一步减少;且求三差后,相位观测值 的有效数字位大为减少,增大了计算过程的凑整误差,这些将对未知参数的解算产生不良影响。所以,三差模型求得的基线结果精度不够高,在数据处理中,只作为初解,用于协助求解整周未知数N(t0)和周跳等问题。
的有效数字位大为减少,增大了计算过程的凑整误差,这些将对未知参数的解算产生不良影响。所以,三差模型求得的基线结果精度不够高,在数据处理中,只作为初解,用于协助求解整周未知数N(t0)和周跳等问题。