同步RS触发器虽然解决了同步触发的问题,但仍存在空翻现象。为了消除空翻,又产生了主从结构的触发器。下面仍以主从RS触发器为例介绍主从触发器的电路结构和动作特点。
图1所示为主从RS触发器的电路结构。从中可以清楚地看到,主从RS触发器由两个同步RS触发器构成:一个是由G1、 G2、G3、G4构成的从触发器;另一个是由G5、G6、G7、G8构成的主触发器。主触发器的时钟脉冲CP与从触发器的时钟脉冲![]() 通过一个非门连接,因此主触发器的时钟脉冲与从触发器的时钟脉冲反相。
通过一个非门连接,因此主触发器的时钟脉冲与从触发器的时钟脉冲反相。
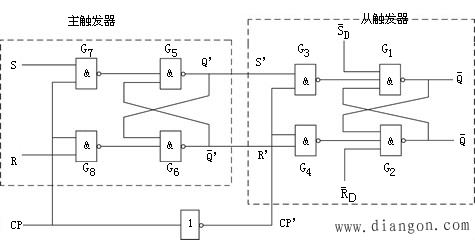 |
| 图1 主从RS触发器的电路结构 |
当CP=1时,主触发器的状态![]() 根据输入端R、S的状态而变化,而此时
根据输入端R、S的状态而变化,而此时![]() =0,所以无论输入端R、S的状态如何变化,从触发器的状态(也是整个触发器的状态)Q保持不变。
=0,所以无论输入端R、S的状态如何变化,从触发器的状态(也是整个触发器的状态)Q保持不变。
当CP从1下跳为0 (下降沿)时,![]() 则从0上跳为1,从触发器的状态将根据输入
则从0上跳为1,从触发器的状态将根据输入![]() 和
和![]() 的状态发生变化。由于从触发器的输入
的状态发生变化。由于从触发器的输入![]() 和
和![]() 分别为主触发器的输出
分别为主触发器的输出![]() 和
和![]() ,因此
,因此![]() 和
和![]() 的状态始终相反,从触发器触发后的状态始终与输入端
的状态始终相反,从触发器触发后的状态始终与输入端![]() 的状态相同,也就是与主触发器的状态
的状态相同,也就是与主触发器的状态![]() 相同。
相同。
在CP=0(即![]() =1)期间,由于主触发器保持原态不变,因而从触发器的输入也保持不变,故从触发器的状态也保持不变。
=1)期间,由于主触发器保持原态不变,因而从触发器的输入也保持不变,故从触发器的状态也保持不变。
因此,在CP的一个变化周期里,触发器的状态只可能变化一次,只是在时钟脉冲CP的下降沿来临时,从触发器将主触发器的状态输出。