来源:本站
导读:目前正在解读《PID自动/手动无扰动切换的仿真实验》的相关信息,《PID自动/手动无扰动切换的仿真实验》是由用户自行发布的知识型内容!下面请观看由(
电工学习网 - www.9pbb.com)用户发布《PID自动/手动无扰动切换的仿真实验》的详细说明。
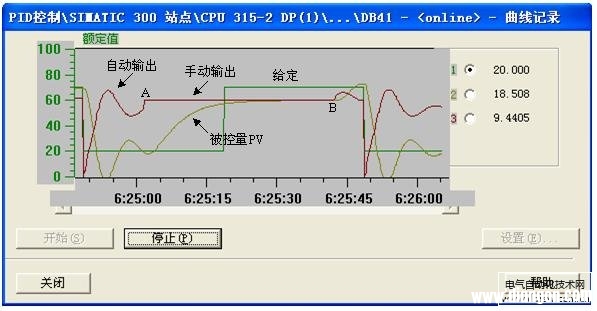
S7-300 PID控制功能块FB41的BOOL输入参数MAN_ON为1状态时,控制器为手动模式,0状态时为自动模式。在手动模式,PID控制器的输出值被手动输入值MAN代替。
PID的输出值由比例、积分、微分分量()和扰动量DISV组成,即
PID输出值=LMN_P + LMN_I + LMN_D + DISV
在手动模式,控制器输出中的积分分量被自动设置为LMN–LMN_P–DISV,而微分分量被自动设置为0。此时的PID输出为
PID输出值=LMN_P +(LMN–LMN_P–DISV)+ 0 + DISV = LMN
这样可以保证手动到自动的无扰切换,即切换前后PID控制器的输出值LMN不会突变。
提醒:《PID自动/手动无扰动切换的仿真实验》最后刷新时间 2023-07-10 04:09:31,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《PID自动/手动无扰动切换的仿真实验》该内容的真实性请自行鉴别。