1、定子磁链和电压空间矢量的关系
结论:非零电压矢量能产生定子磁链并使它运动,这样控制电压矢量的顺序和作用时间就可以迫使磁链按所需的轨迹运动。
2、电压矢量对电机转矩的影响电机的转矩大小不仅与定、转子的磁链幅值有关,还与它们的夹角有关。当幅值不变时,夹角从0变到90度是电磁转矩从0变到最大,所以对它们的夹角进行控制也能控制转矩,这就是直接转矩控制的思想。电压矢量对转矩的影响体现在定、转子磁链夹角的控制作用运行中定子磁链幅值恒定为额定值,转子磁链由负载决定,要改变转矩只有改变它们的夹角,由改变电压矢量完成。工作电压矢量使定子磁链走,零矢量使定子磁链停,控制定子磁链的走停,就控制了磁通角的大小。也就是控制了转矩。
图1所示已知t1时刻定子、转子和磁通角如图所示,t2时刻给出电压矢量 下面分析一下t1和t2时刻间定、转子间的磁通角的变化大小。
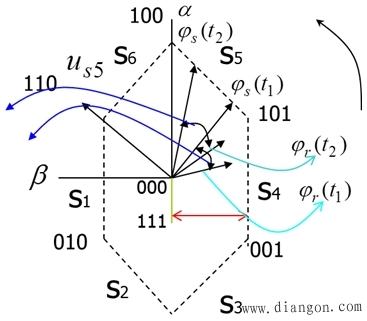
图1

期间如果定子的磁链的速度大于转子磁链的速度即 增大相应的转矩增大,如果t2时刻给出零电压矢量,定子磁链不动,由于惯性转子磁链继续运动磁通角减小,转矩减小。
如要加大电磁转矩按上述规律加载电压矢量,只要电压幅值够大,定子磁链的速度会大于转子磁链的速度,使电磁转矩增大。加零电压矢量,可以减小转矩,这就是直接转矩控制的基本原理控制策略上不用对夹角精确控制只需对定子的磁链进行走停的开关控制即可。
3、对电压矢量的正确选择
(1)选择正确的电压矢量的次序
(2)选择给出电压矢量的时刻
才能得到六边形磁链的轨迹。
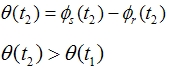
1系统组成(如图104)
AMC转矩计算单元
AZS零矢量
DMC磁链自控单元
ASR转速调节器
ATR转矩调节器
控制特点
与VC系统一样,它也是分别控制异步电动机的转速和磁链,但在具体控制方法上,DTC系统与VC系统不同的特点是:
1) 转矩和磁链的控制采用双位式砰-砰控制器,并在 PWM 逆变器中直接用这两个控制信号产生电压的SVPWM 波形,从而避开了将定子电流分解成转矩和磁链分量,省去了旋转变换和电流控制,简化了控制器的结构。
2) 选择定子磁链作为被控量,而不象VC系统中那样选择转子磁链,这样一来,计算磁链的模型可以不受转子参数变化的影响,提高了控制系统的鲁棒性。如果从数学模型推导按定子磁链控制的规律,显然要比按转子磁链定向时复杂,但是,由于采用了砰-砰控制,这种复杂性对控制器并没有影响。
3) 由于采用了直接转矩控制,在加减速或负载变化的动态过程中,可以获得快速的转矩响应,但必须注意限制过大的冲击电流,以免损坏功率开关器件,因此实际的转矩响应的快速性也是有限的。
4) 定子坐标系下分析电机的数学模型直接控制磁链和转矩,不需要和直流机比较、等效、转化,省去复杂的计算。
性能比较
从总体控制结构上看,直接转矩控制(DTC)系统和矢量控制(VC)系统是一致的,都能获得较高的静、动态性能。