1.驱动系统
要使机器人运行起来,就需给各个关节即每个运动自由度安置传动装置,这就是驱动系统。驱动系统可以是液压传动、气动传动、电动传动,或者把它们结合起来应用的综合系统;可以直接驱动或者通过同步带、链条、轮系、谐波齿轮等机械传动机构进行间接驱动。
2.机械结构系统
工业机器人的机械结构系统是工业机器人为完成各种运动的机械部件。系统由骨骼(杆件)和连接它们的关节(运动副)构成,具有多个自由度,主要包括手部、腕部、臂部、机身等部件。
(1)手部:又称为末端执行器或夹持器,是工业机器人对目标直接进行操作的部分,在手部可安装专用的工具,如焊枪、喷枪、电钻、电动螺钉(母)拧紧器等。
(2)腕部:腕部是连接手部和臂部的部分,主要功能是调整手部的姿态和方位。
(3)臂部:用以连接机身和腕部,是支撑腕部和手部的部件,由动力关节和连杆组成。用以承受工件或工具的负荷,改变工件或工具的空间位置,并将它们送至预定位置。
(4)机身:是是机器人的支撑部分,有固定式和移动式两种。
导读:目前正在解读《工业机器人的组成》的相关信息,《工业机器人的组成》是由用户自行发布的知识型内容!下面请观看由(电工学习网 - www.9pbb.com)用户发布《工业机器人的组成》的详细说明。
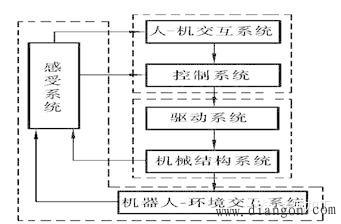
工业机器人系统由三大部分六个子系统组成。三大部分是:机械部分、传感部分、控制部分。六个子系统是:驱动系统、机械结构系统、感受系统、机器人—环境交互系统、人—机交互系统、控制系统。下面将分述六个子系统。
提醒:《工业机器人的组成》最后刷新时间 2023-07-10 03:58:00,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《工业机器人的组成》该内容的真实性请自行鉴别。