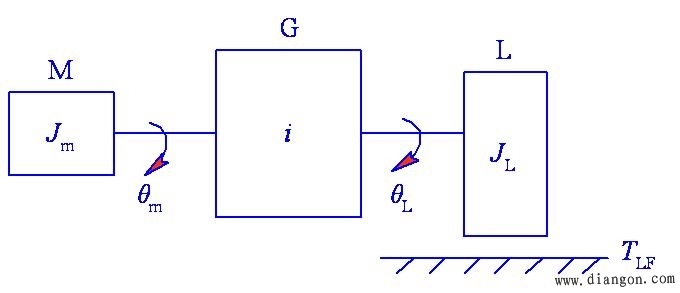
 图1 电机、传动装置和负载的传动模型
图1 电机、传动装置和负载的传动模型
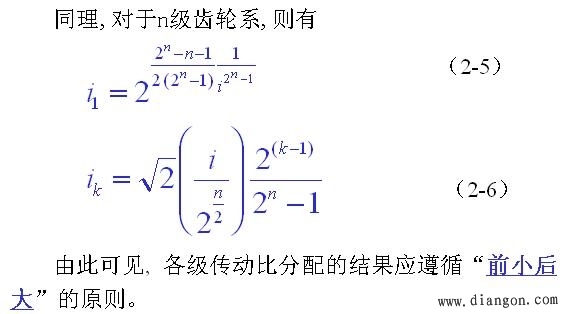
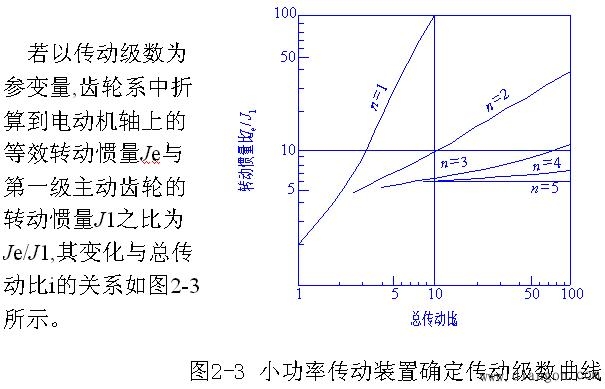
二、传动链的级数和各级传动比的分配 1. 等效转动惯量最小原则 齿轮系传递的功率不同, 其传动比的分配也有所不同。 1) 小功率传动装置 电动机驱动的二级齿轮传动系统如图2所示。
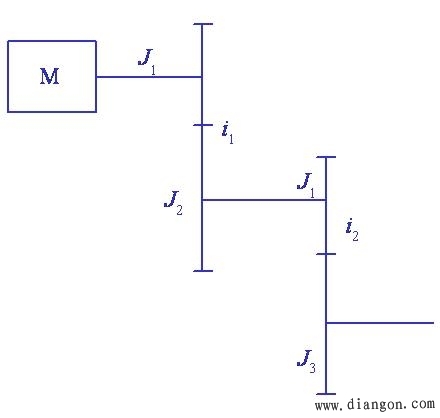 图2 电动机驱动的两级齿轮传动
图2 电动机驱动的两级齿轮传动
 2) 大功率传动装置
大功率传动装置传递的扭矩大,各级齿轮副的模数、齿宽、直径等参数逐级增加,各级齿轮的转动惯量差别很大。大功率传动装置的传动级数及各级传动比可依据图2-4、图2-5、图2-6来确定。传动比分配的基本原则仍应为“前小后大”
2) 大功率传动装置
大功率传动装置传递的扭矩大,各级齿轮副的模数、齿宽、直径等参数逐级增加,各级齿轮的转动惯量差别很大。大功率传动装置的传动级数及各级传动比可依据图2-4、图2-5、图2-6来确定。传动比分配的基本原则仍应为“前小后大” 图2-4 大功率传动装置确定传动级数曲线
图2-4 大功率传动装置确定传动级数曲线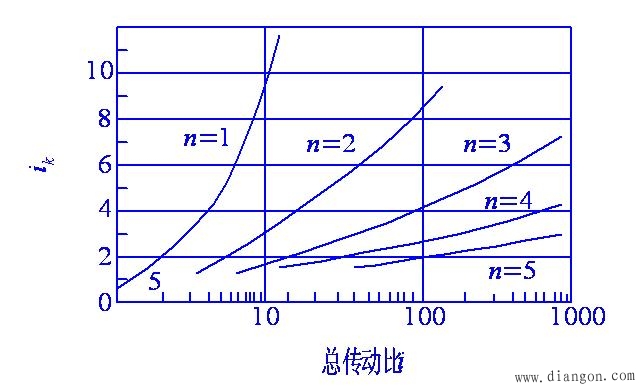 图2-5 大功率传动装置确定第一级传动比曲线
图2-5 大功率传动装置确定第一级传动比曲线  图2-6 大功率传动装置确定各级传动比曲线
2.质量最小原则
1) 大功率传动装置
对于大功率传动装置的传动级数确定,主要考虑结构的紧凑性。在给定总传动比的情况下,传动级数过少会使大齿轮尺寸过大,导致传动装置体积和质量增大; 传动级数过多会增加轴、轴承等辅助构件,导致传动装置质量增加。设计时应综合考虑系统的功能要求和环境因素,通常情况下传动级数要尽量地少。
大功率减速传动装置按质量最小原则确定的各级传动比表现为“前大后小”的传动比分配方式。减速齿轮传动的后级齿轮比前级齿轮的转矩要大得多,同样传动比的情况下齿厚、质量也大得多,因此减小后级传动比就相应减少了大齿轮的齿数和质量。大功率减速传动装置的各级传动比可以按图2-7和图2-8选择。
图2-6 大功率传动装置确定各级传动比曲线
2.质量最小原则
1) 大功率传动装置
对于大功率传动装置的传动级数确定,主要考虑结构的紧凑性。在给定总传动比的情况下,传动级数过少会使大齿轮尺寸过大,导致传动装置体积和质量增大; 传动级数过多会增加轴、轴承等辅助构件,导致传动装置质量增加。设计时应综合考虑系统的功能要求和环境因素,通常情况下传动级数要尽量地少。
大功率减速传动装置按质量最小原则确定的各级传动比表现为“前大后小”的传动比分配方式。减速齿轮传动的后级齿轮比前级齿轮的转矩要大得多,同样传动比的情况下齿厚、质量也大得多,因此减小后级传动比就相应减少了大齿轮的齿数和质量。大功率减速传动装置的各级传动比可以按图2-7和图2-8选择。
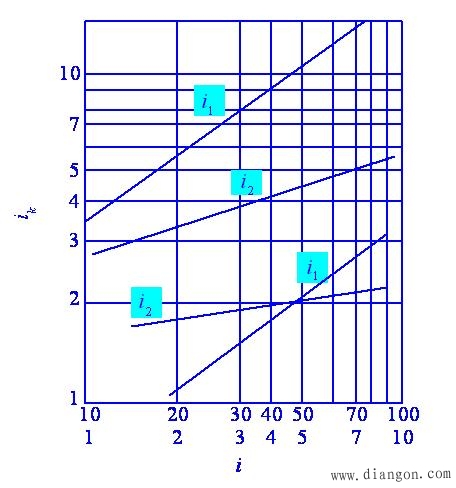 图2-7 大功率传动装置两级传动比曲线
(i<10时,使用图中的虚线)
图2-7 大功率传动装置两级传动比曲线
(i<10时,使用图中的虚线) 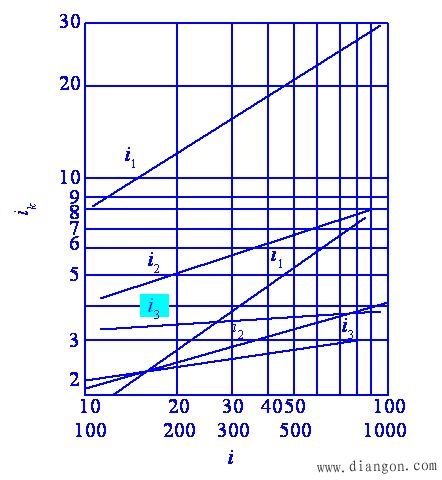 图2-8 大功率传动装置三级传动比曲线
( i <100时,使用图中的虚线)
2) 小功率传动装置
对于小功率传动装置,按质量最小原则来确定传动比时,通常选择相等的各级传动比。
在假设各主动小齿轮的模数、齿数均相等的特殊条件下,各大齿轮的分度圆直径均相等,因而每级齿轮副的中心距也相等。这样便可设计成如图2-9所示的回曲式齿轮传动链; 其总传动比可以非常大。显然,这种结构十分紧凑。
图2-8 大功率传动装置三级传动比曲线
( i <100时,使用图中的虚线)
2) 小功率传动装置
对于小功率传动装置,按质量最小原则来确定传动比时,通常选择相等的各级传动比。
在假设各主动小齿轮的模数、齿数均相等的特殊条件下,各大齿轮的分度圆直径均相等,因而每级齿轮副的中心距也相等。这样便可设计成如图2-9所示的回曲式齿轮传动链; 其总传动比可以非常大。显然,这种结构十分紧凑。
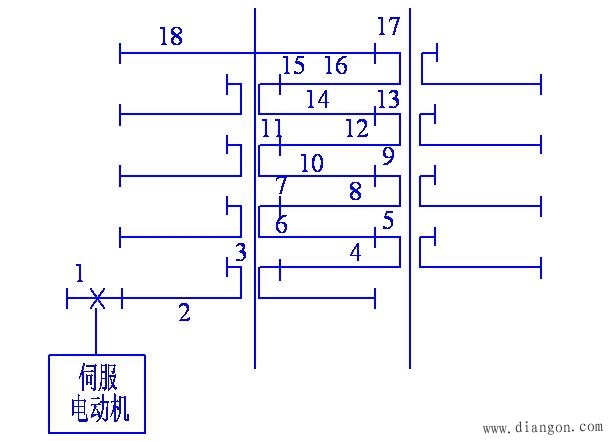 图2-9 回曲式齿轮传动链
3. 输出轴转角误差最小原则
以图2-10所示四级齿轮减速传动链为例。四级传动比分别为 i1、 i2、 i3、 i4,齿轮1~8 的转角误差依次为:ΔΦ1~ΔΦ8。
图2-9 回曲式齿轮传动链
3. 输出轴转角误差最小原则
以图2-10所示四级齿轮减速传动链为例。四级传动比分别为 i1、 i2、 i3、 i4,齿轮1~8 的转角误差依次为:ΔΦ1~ΔΦ8。
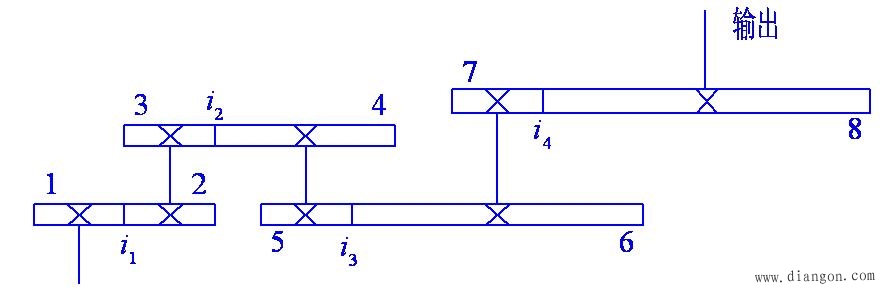 图 2-10四级减速齿轮传动链
图 2-10四级减速齿轮传动链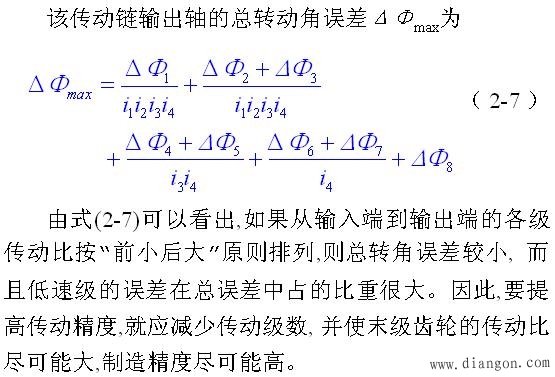 4. 三种原则的选择
在设计齿轮传动装置时,上述三条原则应根据具体工作条件综合考虑。
(1) 对于传动精度要求高的降速齿轮传动链,可按输出轴转角误差最小原则设计。若为增速传动,则应在开始几级就增速。
(2) 对于要求运转平稳、启停频繁和动态性能好的降速传动链,可按等效转动惯量最小原则和输出轴转角误差最小原则设计。
(3) 对于要求质量尽可能小的降速传动链,可按质量最小原则设计。
4. 三种原则的选择
在设计齿轮传动装置时,上述三条原则应根据具体工作条件综合考虑。
(1) 对于传动精度要求高的降速齿轮传动链,可按输出轴转角误差最小原则设计。若为增速传动,则应在开始几级就增速。
(2) 对于要求运转平稳、启停频繁和动态性能好的降速传动链,可按等效转动惯量最小原则和输出轴转角误差最小原则设计。
(3) 对于要求质量尽可能小的降速传动链,可按质量最小原则设计。