S7-1200/1500的参数自整定分为预调节和精确调节两个阶段。预调节要求
1)设定值和过程值均在组态的极限值范围内。
2)设定值和过程值的差值的绝对值应大于过程值上、下限之差的30%,还应大于设定值的50%。
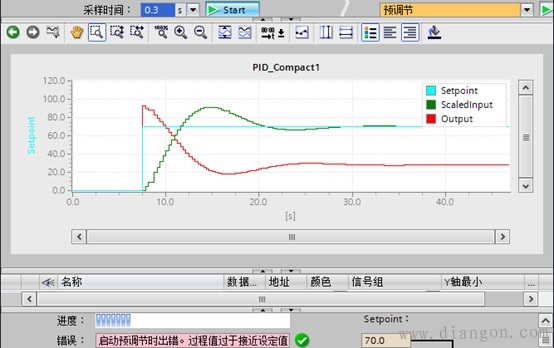
我用CPU 1516C做与调节实验时与到两个问题。在70%阶跃的给定值产生之后,启动预调节,出现“过程值过于接近设定值”的错误信息(见下图)。其原因是启动的滞后时间较大,过程值上升到接近设定值了。
为了解决这个问题,在产生阶跃设定值后,立即启动预调节,解决了这个问题。
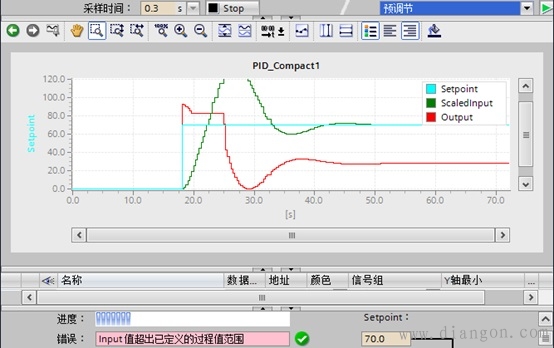
解决了这个问题之后,预调节时出现了第二条错误信息:“Input值超出已定义的过程值范围”。从下图可以看出,与调节时PID控制器红色的输出值是恒定值。经过反复摸索,发现这个输出值与PID控制器的参数“增益”有关。而过程变量(Input)与PID输出值和被控对象的增益有关。
通过调节PID的增益,从1.5降到0.4时,预调节成功,出现“系统已调节的信息”(见下图)。
