本文从众多应用案例中,提炼整理出最常见的偏位原因及对策,用以帮助设备厂家调试人员快速定位问题、采取各种适宜措施提高设备抗干扰性、为设备正确接地保证正常运行。
偏位的现象、原因及解决办法(规律性和非规律性偏位两种)
1.规律性偏位
偏位现象1:做往复运动,往前越偏越多(少)。
可能原因①:脉冲当量不对
原因分析:无论是同步轮结构还是齿轮齿条结构,都存在加工精度误差。运动控制卡(plc)并没有设置准确的脉冲当量。例如上一批同步轮电机旋转一圈设备前进10mm,这批同步轮大一点电机转一圈前进了10.1mm,就会导致该批机器每次运行比以前的设备多走1%的距离。
解决方式:出机前用机器画一个尽可能大幅面的正方形,然后用尺去量实际尺寸,对比实际尺寸和控制卡设置尺寸之间的比例,然后将其加入控制卡运算,反复进行三次之后就会得到一个比较准确的值。
可能原因②:脉冲指令的触发沿与方向指令的电平变换时序冲突
原因分析:驱动器要求上位机发出的脉冲指令的沿与方向指令电平变换有一定时序要求。而部分PLC或运动控制卡编程时没满足这种要求(或者其自身的规则不符合驱动器的要求),导致脉冲和方向时序并不能满足要求而偏位。
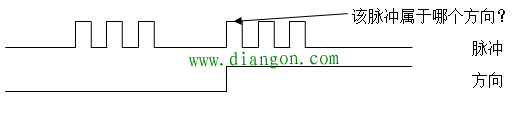
解决方式:控制卡(PLC)软件工程师将方向信号提前。或者驱动器应用技术人员更改脉冲沿计数方式。
偏位现象2:运动过程中电机在固定点抖动,过该点后能正常运行,但少走一段距离
可能原因:机械装配问题
原因分析:机械结构在某个点阻力较大。由于机械安装的平行度、垂直度或设计不合理的原因导致设备在某个点阻力较大,步进电机的力矩变化规律是速度越快力矩越小,很容易在高速段卡死,速度降下来却能走过去。
解决方式:
1)检查机械结构出现卡死的原因,是该处摩擦阻力大还是滑轨装得不平行等。
2)步进电机力矩不够。由于终端客户出现提速或者加大负载的要求,导致原本能满足要求的电机在高速力矩不够,从而发生高速段堵转的现象。解决方法可以通过驱动器设置更大输出电流或者在驱动器允许电压范围内提高供电电压,或更换更大转矩的电机。
偏位现象3:电机往复运动来回均没走到位且偏移量固定
可能原因:皮带间隙
原因分析:皮带与同步轮之间存在反向间隙导致,往回走会存在一定量的空程。
解决方式:如运动控制卡具有皮带反向间隙补偿功能,可利用之;或者绷紧皮带。
偏位现象4:切绘轨迹不重合
可能原因①:惯量过大
原因分析:平板切绘机喷墨过程由光栅控制,扫描式运动,切割时走插补运动,两者轨迹不重合是因为,类似设备X轴小车惯量较小且由光栅定位,喷绘位置准确,而Y轴龙门结构惯量较大,电机响应性差,插补运动时Y轴跟随性不好导致轨迹部分偏位。
解决方式:增加Y轴减速比,使用陷波功能提高伺服驱动器刚性以解决该问题。
可能原因②:刀和喷头重合度没调好
原因分析:因为切绘机刀和喷头都装在X轴小车上但是两者有坐标差,切绘机上位机软件能调整这个坐标差做到刀和喷头轨迹重合,如果没调好,切绘轨迹会整体分离。
解决方式:修改刀和喷头位置补偿参数。
偏位现象5:画圆成椭圆
可能原因: XY轴平台两轴不垂直
原因分析:XY轴结构,图形偏位例如画圆成椭圆,正方形偏位成平行四边形。龙门结构X轴与Y轴不垂直时会导致该问题。
解决方式:调节龙门架X轴与Y轴垂直度可以解决该问题。
2.非规律性偏位
偏位现象:运行过程中不定期出现偏位,偏位具有偶然性,偏位多少不确定
可能原因①:干扰原因导致电机偏位
问题分析:非周期性偏位大部分因为干扰导致,少部分因为运动控制卡发出的窄脉冲或者机械结构松动引起。
解决方式:
如果干扰出现的比较频繁,则可以利用示波器监控脉冲频率确定干扰发生的时间进而确定干扰源,移除或者使脉冲信号远离干扰源能解决部分干扰。如果干扰出现的比较偶然,或者难以确定干扰源位置或电气柜已固定难以移动,则可以考虑采用以下措施来解决问题:
① 驱动器接地,② 脉冲线更换双绞屏蔽线,③ 脉冲正负端并联103陶瓷电容滤波(脉冲频率小于54kHz),④ 脉冲信号套磁环,⑤ 驱动器和控制器电源前端增加滤波器。

备注:常见的干扰源包括变压器、线圈式继电器、变频器、电磁阀、高压电线等。规划电气柜的时候应避免信号线靠近这些干扰源,信号线与高压供电线宜分不同线槽布线。
可能原因②:脉冲串出现窄脉冲
问题分析:客户运动控制卡发送脉冲串占空比较小或过大,出现窄脉冲,驱动器识别不了,导致偏位。
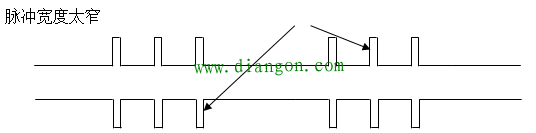
解决方式:查找控制器出现这种问题的原因,是脉冲接口问题,还是软件算法问题
可能原因③:机械结构松动
问题分析:连轴器、同步轮、减速机等用顶丝固定或螺丝夹紧的连接件在快速冲击场合运行一段时间可能出现松动,导致偏位。用键和键槽配合固定的同步轮则注意键和键槽之间是否存在间隙,齿轮齿条结构则注意两者之间的配合间隙。
解决方式:关键部分、受力大的结构螺丝一定用弹垫、而且螺丝或顶丝宜涂覆螺丝胶。电机轴与联轴器尽量用键槽连接。
可能原因④:滤波电容过大
问题分析:滤波电容过大,普通RC滤波器截止频率是1/2πRC,电容越大截止频率越小,一般驱动器脉冲端电阻为270欧姆,103陶瓷电容构成的RC滤波电路截止频率为54khz,频率高于此会因为幅值衰减过大而导致部分有效信号无法被驱动器正确检测到,最终导致偏位。
解决方式:加滤波电容时需要核算脉冲频率、一定要保证最大通过脉冲频率满足要求
可能原因⑤:PLC或者运动控制卡最大脉冲频率不够高
原因分析:一般PLC允许输出最大脉冲频率为100kHz,运动控制卡根据其发脉冲芯片不一样差异较大,特别是普通单片机开发的运动控制卡可能会因为脉冲频率不够高导致偏位。
解决方式:假如上位机最大脉冲频率有限,为了保证速度,可以适当降低驱动器细分,以保证电机转速。