现以相同的机械条件,比较位置与速度两种控制模式,伺服电机运行速度的稳定性。
机械传动方式为同步带方式;
伺服电机为R88M-G型伺服电机;
驱动器为R88D-GT型驱动器;
上位机控制器为CP1H-XA型plc。
一、位置控制模式
1、位置控制时的控制接线方式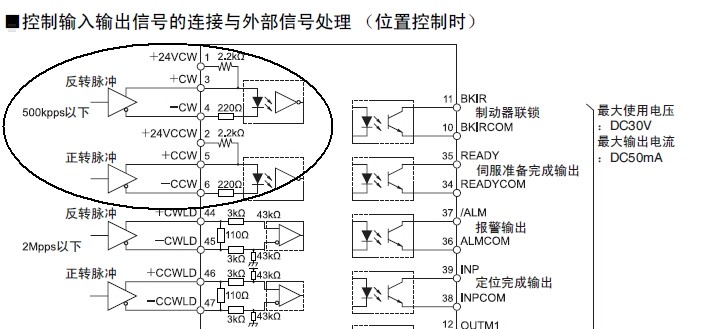
2、必要的参数设定:Pn02(控制模式选择) 设定为0。
位置控制时主要是通过上位机PLC中的SPED指令设定伺服电机的运行频率。
3、位置控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图: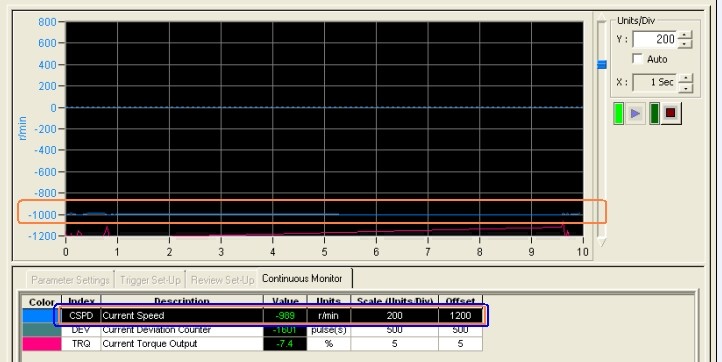
二、速度控制模式
1、速度控制时的控制接线方式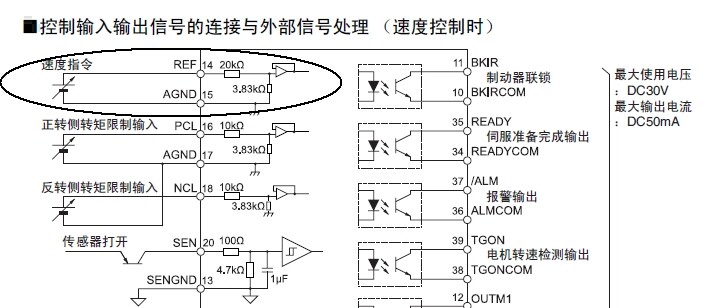
2、必要的参数设定:Pn02(控制模式选择) 设定为1。
通过外接0—10V DC信号,由电位器输入到PLC的A/D中,然后由PLC的D/A输出来控制伺服电机运行。
3、速度控制时,用CX-Drive软件监视伺服电机的速度曲线。如下图: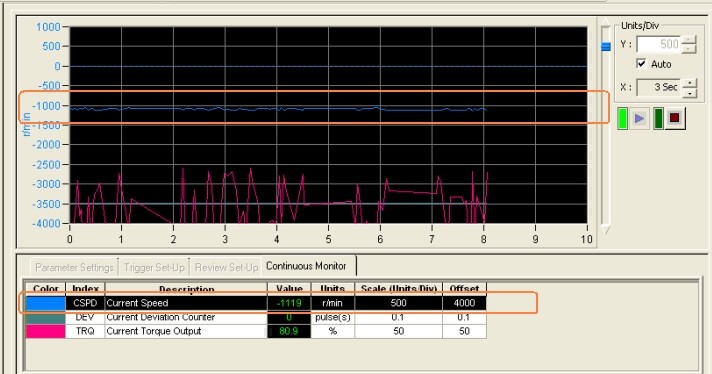
三、总结
根据上述的速度曲线图中的比较,说明位置控制模式下的速度控制比速度模式下的速度控制要稳定。经长时间的生产运行,位置模式控制的速度一直都很稳定,满足的用户的要求。
导读:目前正在解读《伺服位置与速度模式控制设备速度的比较》的相关信息,《伺服位置与速度模式控制设备速度的比较》是由用户自行发布的知识型内容!下面请观看由(电工学习网 - www.9pbb.com)用户发布《伺服位置与速度模式控制设备速度的比较》的详细说明。
提醒:《伺服位置与速度模式控制设备速度的比较》最后刷新时间 2023-07-10 04:13:01,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《伺服位置与速度模式控制设备速度的比较》该内容的真实性请自行鉴别。