在系统的840D中,我进去轴信息的界面中,看见跟随误差跟控制误差有什么作用呢?我没动一次倍率,它们也有变化,这是为什么呢?
答:
西门子840D中的轴信息的跟随误差即followingerror,是对机床坐标轴的运动性能的动态监控,数控系统利用计算位置设定值与实际位置值的偏差得到跟随误差,从而实现轮廓监控。
轴参数MD36400:CONTOUR_TOL(轮廓监控允差带)定义了NC位置给定和位置实际值的最大差值。
在位控运行下系统对坐标的伺服运行进行轮廓监控,当超出允差带时,会触发报警“25050Axis[Name]Contourmonitoring”同时坐标轴会根据当前设定的制动斜度而制动。
为了得到以下:
1.较小的跟随误差,
2.较小的圆弧半径误差,
3.较快的程序段转换,
4.较高轮廓准确度
可以适当增加MD32200:POSCTRL_GAIN(kV因子)。
而控制误差是数控系统在位置控制器的位置设定值与实际位置值的偏差。请注意控制误差中的位置控制器的概念。
如图示_位置设定值与位置控制器
跟随误差跟控制误差有变化,这是因为由编码器检测的实际位置值肯定在不断发生动态变化,因此位置设定值与实际位置值的偏差也在不断发生动态变化,即产生了跟随。
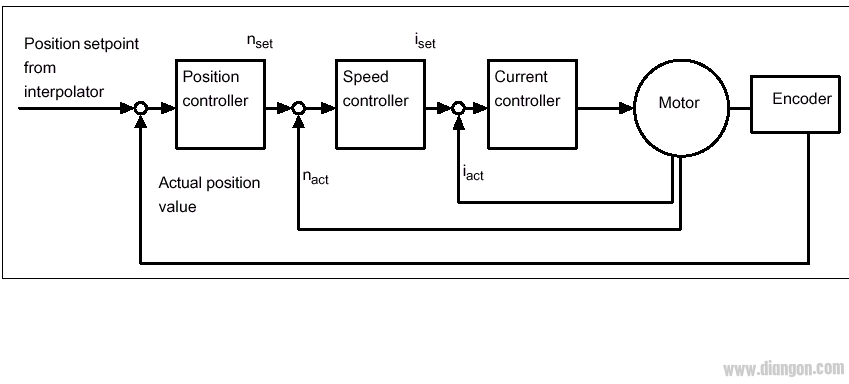
位置设定值与位置控制器