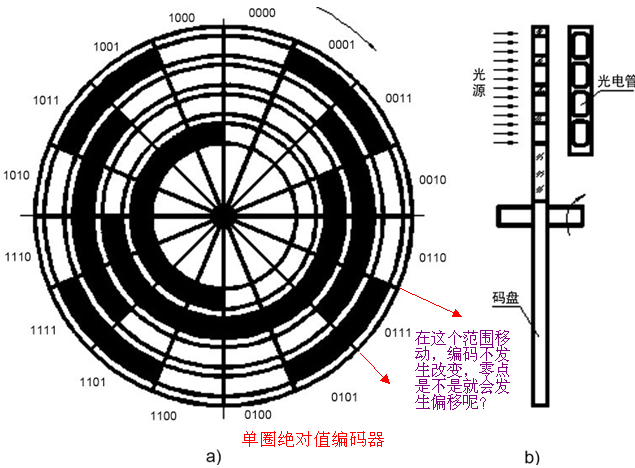
还有就是说单圈绝对值编码器测量范围为360,为什么不是任意角度呢,根据它转的圈数角度测量应该是没限制的吧?
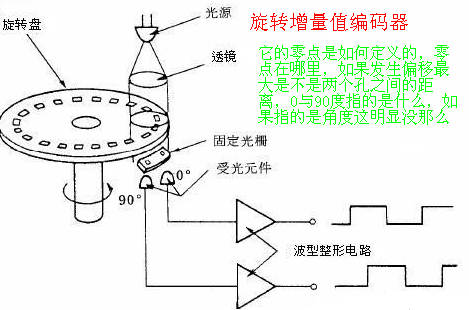
 增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90?,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
增量式编码器是直接利用光电转换原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位差90?,从而可方便地判断出旋转方向,而Z相为每转一个脉冲,用于基准点定位。
其中基准点定位指的是什么?还有就是说A、B两组脉冲相位差90,这也是在一定的条件下(S0=S1=S2/2)才能在电角度上相差90度的,而不是空间上的相位差,是不是这样理解

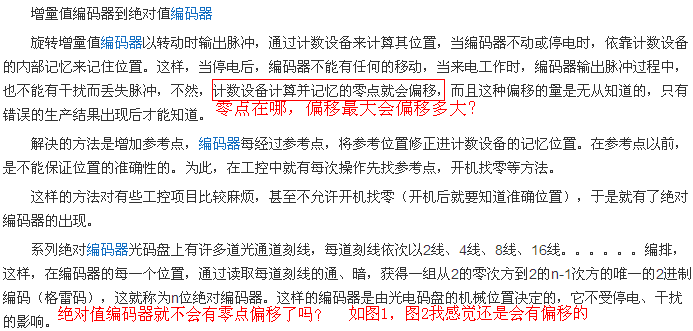
答:绝对值编码器输出的不是脉冲,而是码值,是一串二进制数(或格雷码等),比如单圈9位绝对值编码器,输出的是一串9位的二进制数,编码器旋转一圈,会有2的9次方个不同的数,超出一圈会出现码值重复,所以说测量范围是360度。你所说的根据测量圈数去测定任意角度,那是软件上通过编程实现单圈当多圈使用,不是编码器本身的属性。
关于你图里的绝对值编码器的零点偏移,很好理解。绝对值编码,是不不断跳变的量,每旋转一定角度,比如说0.5度,码值变化一次。假设你设定的零点是011010010,你旋转了0.1度,码值很可能不变化,显示的零点没变化,编码器实际位置却变化了,这就是“漂移”了。
增量型编码器,输出的是脉冲,通常是非常规律的正弦波或方波。波的周期取决于编码器精度。AB脉冲相差90度。根据收到的脉冲数,可知编码器旋转了多少,从而确定位移或速度;根据接收到的A超前B或者A落后B,即可确定旋转方向。零脉冲每旋转一圈输出一个脉冲,提供了一个基准点。基准点不懂?大概就是参考点初始点之类的意思,比如百米赛跑,总要有个起跑线吧。