来源:本站
导读:目前正在解读《步进电动机的结构与工作原理》的相关信息,《步进电动机的结构与工作原理》是由用户自行发布的知识型内容!下面请观看由(
电工学习网 - www.9pbb.com)用户发布《步进电动机的结构与工作原理》的详细说明。
步进电动机按其工作原理主要可分为磁电式和反应式两大类,这里只介绍常用的反应式步进电动机的工作原理。三相反应式步进电动机的工作原理如图1所示,其中步进电动机的定子上有6个齿,其上分别缠有U、V、W三相绕组,构成三对磁极;转子上则均匀分布着4个齿。步进电动机采用直流电源供电。当U、V、W三相绕组轮流通电时,通过电磁力的吸引,步进电动机转子一步一步地旋转。
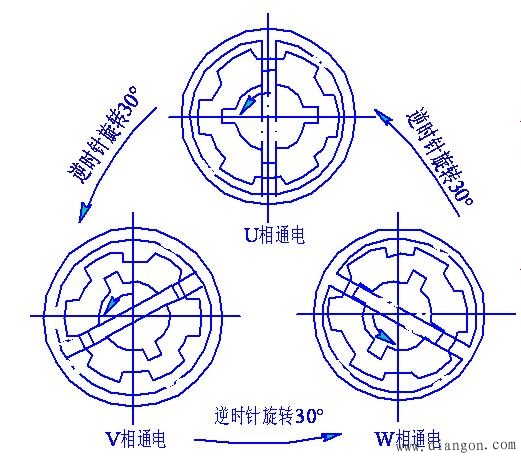
图1 步进电动机运动原理图
假设U相绕组首先通电,则转子上、下两齿被磁场吸住,转子就停留在U相通电的位置上。然后U相断电,V相通电,则磁极U的磁场消失,磁极V产生了磁场,磁极V的磁场把离它最近的另外两齿吸引过去,停止在V相通电的位置上,这时转子逆时针转了30°。随后V相断电,W相通电,根据同样的道理,转子又逆时针转了30°,停止在W相通电的位置上。若再U相通电,W相断电,那么转子再逆转30°。定子各相轮流通电一次,转子转一个齿。步进电动机绕组按U→V→W→U→V→W→U…依次轮流通电,步进电动机转子就一步步地按逆时针方向旋转。反之,如果步进电动机按倒序依次使绕组通电,即U→W→V→U→W→V→U…则步进电动机将按顺时针方向旋转。
步进电动机绕组每次通断电使转子转过的角度称之为步距角。上述分析中的步进电动机步距角为30°。对于一个真实的步进电动机,为了减少每通电一次的转角,在转子和定子上开有很多定分的小齿。其中定子的三相绕组铁心间有一定角度的齿差,当U相定子小齿与转子小齿对正时,V相和W相定子上的齿则处于错开状态,如图2所示。真实步进电动机的工作原理与上同,只是步距角是小齿距夹角的1/3。
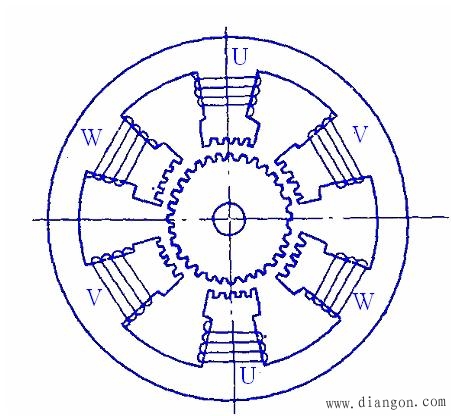
图2 三相反应式步进电动机
提醒:《步进电动机的结构与工作原理》最后刷新时间 2023-07-10 04:02:31,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《步进电动机的结构与工作原理》该内容的真实性请自行鉴别。