近年来,随着电力电子器件的发展,变流技术得到了突飞猛进的发展,特别是在交流调速应用方面获得了极大的成就。变流技术按其功能应用可分成下列几种变流器类型:
整流器——把交流电变为固定的(或可调的)直流电。
逆变器——把固定直流电变成固定的(或可调的)交流电。
斩波器——把固定的直流电压变成可调的直流电压。
交流调压器——把固定的交流电压变成可调的交流电压。
周波变流器——把固定的交流电压和频率变成可调的交流电压和频率。
1.整流器
整流过程是将交流信号转换为直流信号的过程,一般可通过二极管或开关器件组成的桥式电路来实现。图1所示为单相交流信号可控硅桥式整流电路。
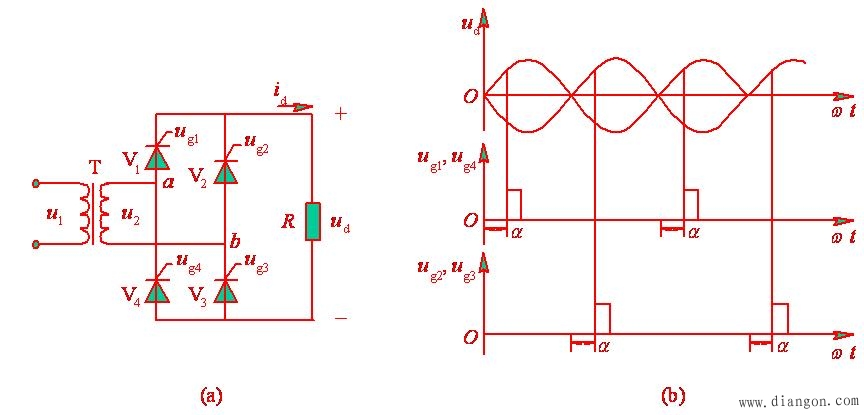
图1单相交流可控硅桥式整流电路
(a)整流电路;(b)波形图
图1(a)中的开关器件V是可控硅(或GTR等),具有正向触发控制导通和反向自关断功能。
ug是控制引脚,按图1(b)中的波形输入控制信号,图1(b)中的ud就是加载在电阻负载R上的整流电压波形。通过调整控制信号的相位角就可以实现输出直流电压的调节。
若将开关器件V换成二极管,则该电路变成了不可调压的整流电路。
2. 斩波器
图2所示为脉宽调速原理示意图。
图2中的二极管是续流二极管,当S断开时,由于电枢电感的存在,电动机的电枢电流可通过它形成续流回路。
图3是直流伺服电机PWM调速和实现正、反转控制的应用举例,图4是双极式H型可逆器的电压、电流波形。图3所示电路由四个大功率晶体管组成,其作用是对电压脉宽变换器输出的信号Us进行放大,输出具有足够功率的信号,以驱动直流伺服电动机。
如图2(b)所示。电枢两端的平均电压为

式中,
ρ=
τ/
T=
Ud/
U (0<
ρ<1),
ρ为导通率(或称占空比)。
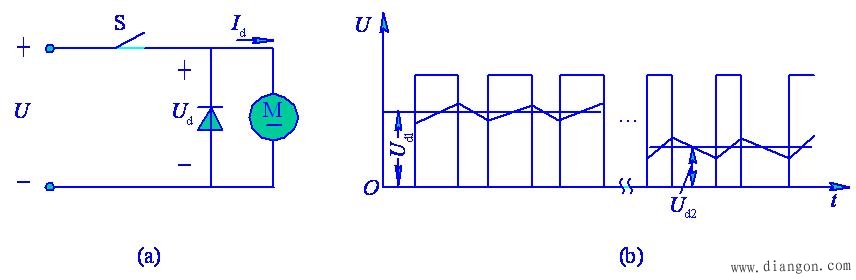
图2脉宽调速原理示意图
(a)原理图;(b)加载在电机电枢上的电压波形
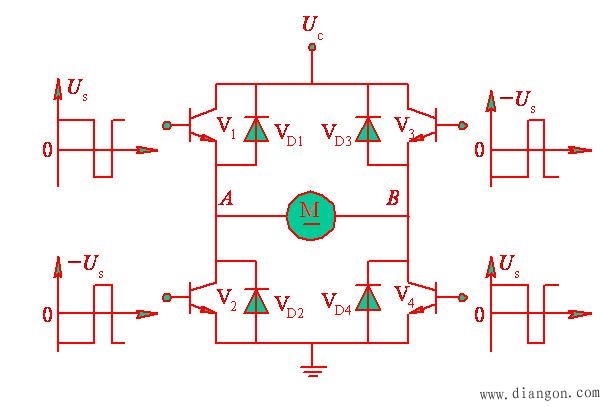
图3 H型桥式PWM晶体管功率放大器
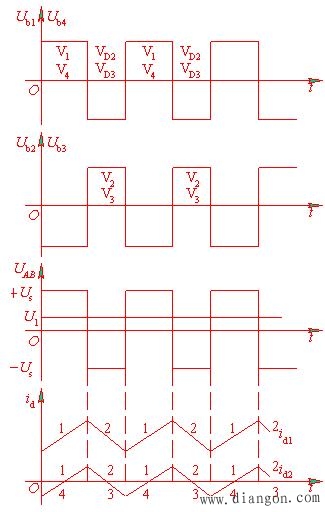
图4 双极式H型可逆器的电压、电流波形的电路原理图
(1)当UAB=0时,Us的正、负脉宽相等,直流分量为零,V1和V4的导通时间与V2和V3的导通时间相等,流过电枢绕组中的平均电流等于零,电动机不转。但在交流分量作用下,电动机在停止位置处微振,这种微振有动力润滑作用,可消除电动机启动时的静摩擦,减小启动电压。
(2)当UAB>0时,Us的正脉宽大于负脉宽,直流分量大于零,V1和V4的导通时间长于V2和V3的导通时间,流过绕组中的电流平均值大于零,电动机正转,且随着U1增加,转速增加。
(3)当UAB<0时,Us的直流分量小于零,电枢绕组中的电流平均值也小于零,电动机反转,且反转转速随着U1减小而增加。
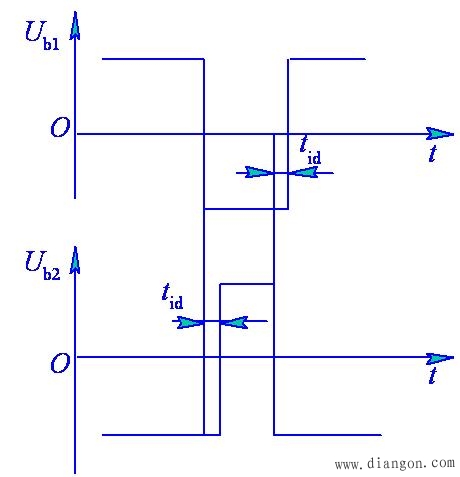
图5 考虑开通延时的基极脉冲电压信号
(4)当V1和V4或V2和V3始终导通时,电动机在最高转速下正转或反转。
该电路中,跨接在电源两端的上、下两个晶体管需要交替导通和截止。由于晶体管的关断过程需要一段时间
toff,在这段时间内晶体管并未完全关断,如果在此期间另一个晶体管已经导通,则将造成上、下两管直通,从而使电源正,负极短路。为了避免发生这种情况,需要设置逻辑延时环节,并保证在对一个管子发出关闭脉冲后(如图6-35中的Ub1),延时
tid后再发出对另一个管子的开通脉冲(如Ub2)。
图6(a)所示是电力晶体管的基极驱动电路及波形,电力晶体管V(如GTR等)的基极需要有一定功率的驱动电路控制,驱动电路的任务是将控制电路的输出信号进行功率放大,使之具有足够的功率去驱动GTR。理想的基极驱动器应满足开通时过驱动,正常导通时浅饱和,关断时要反偏。图6(b)所示就是GTR的一种驱动电路和输入,输出波形。
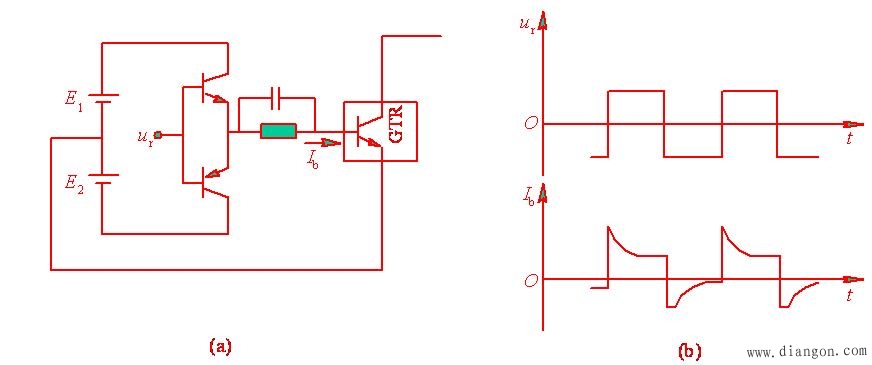
图6 电力晶体管GTR的基极驱动电路及波形
3.逆变器
( 1 )半桥逆变电路
半桥逆变电路原理如图7(a)所示,它有两个导电臂,每个导电臂由一个可控元件和一个反并联二极管组成。在直流侧接有两个相互串联的足够大的电容,使得两个电容的连结点为直流电源的中点。
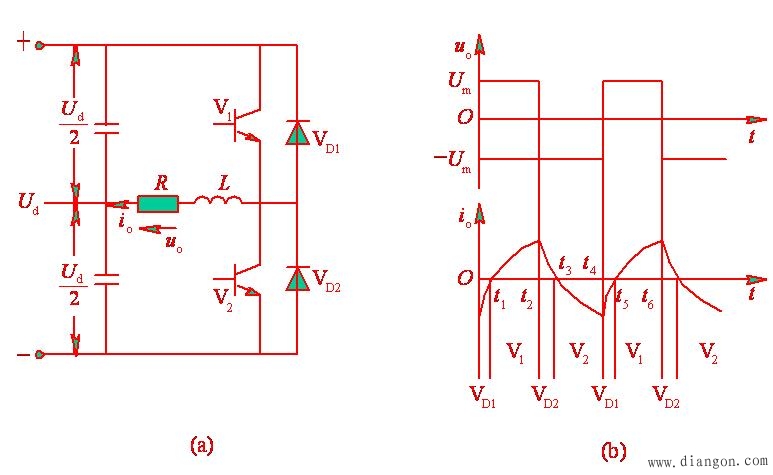
图7 半桥逆变电路及其波形图
( 2 ) 负载换相全桥逆变电路
图8(a)是全桥逆变电路应用的实例。电路的工作波形如图8(b)所示。
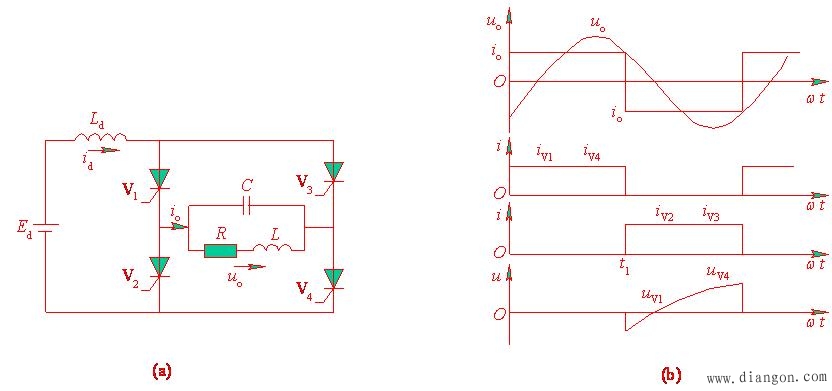
图8 负载换相全桥逆变电路及波形
提醒:《交流调速变流器的类型》最后刷新时间 2023-07-10 04:02:30,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《交流调速变流器的类型》该内容的真实性请自行鉴别。