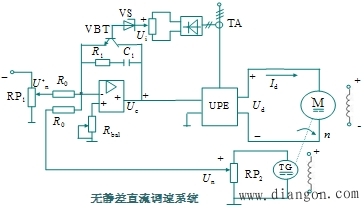
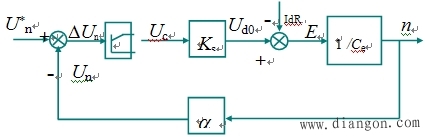
当电动机电流低于其截止值时,上述系统的稳态结构图示于下图,其中 PI 调节器一般用它的输出特性,以表明是比例积分作用。
无静差系统的理想静特性如右图(实线)所示
当 Id > Idcr 时,电流截止负反馈起作用,静特性急剧下垂,基本上是一条垂直线。整个静特性近似呈矩形。
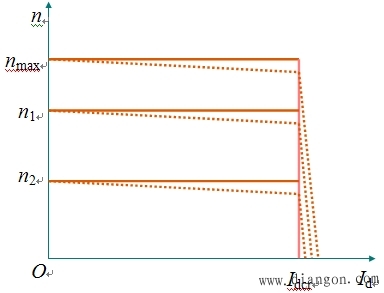
严格地说,“无静差”只是理论上的,实际系统在稳态时,PI 调节器积分电容两端电压不变,相当于运算放大器的反馈回路开路,其放大系数等于运算放大器本身的开环放大系数,数值很大,但并不是无穷大。因此其输入端仍存在很小的,而不是零。这就是说,实际上仍有很小的静差(如虚线所示),只是在一般精度要求下可以忽略不计而已。
4. 稳态参数计算
无静差调速系统的稳态参数计算很简单,在理想情况下,稳态时 △Un =Un* -Un = 0,因而 Un* = Un=αn ,可以直接计算转速反馈系数
U*nmax— 相应的最高给定电压(V)。
电流截止环节的参数很容易根据其电路和截止电流值 Idcr 计算出。
PI调节器的参数Kpi 和τ 可按动态校正的要求计算。