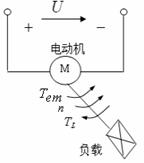
图1单轴电力拖动系统
旋转运动的方程式为
 (1)
(1)
式中, 为电动机产生的拖动转矩(
为电动机产生的拖动转矩( );
); 为负载转矩();
为负载转矩(); 为惯性转矩(或称动转矩),
为惯性转矩(或称动转矩), 为转动惯量可用下式表示
为转动惯量可用下式表示
 (2)
(2)
式中, .
. 分别为旋转部分的质量(
分别为旋转部分的质量( )与重量(
)与重量( );
); .
. 分别为转动惯性半径与直径();
分别为转动惯性半径与直径(); 为重力加速度,
为重力加速度, ;的单位为
;的单位为 。
。
需要说明的是,式(1)中忽略了电动机本身的损耗转矩 ,认为电动机产生的电磁转矩全部用来拖动负载。这一点将在以后的内容详细介绍。
,认为电动机产生的电磁转矩全部用来拖动负载。这一点将在以后的内容详细介绍。
在实际计算中常用式(1)的另一种形式。即将角速度 (
( 的单位为
的单位为 ,
, 的单位为
的单位为 )代入式(1)得运动方程式实用形式:
)代入式(1)得运动方程式实用形式:
 (3)
(3)
式中, 为飞轮矩(
为飞轮矩( ),
), ;系数
;系数 是具有加速度量纲的系数。
是具有加速度量纲的系数。
电动机的转子及其他转动部件的飞轮矩的数值可由相应的产品目录中查到,但是应注意将单位 化成国际单位制(乘以
化成国际单位制(乘以 )。
)。
电动机的工作状态可由运动方程式表示出来。分析式(3)可见
(1)当 ,
, ,则
,则 常值,电力拖动系统处于稳定运转状态;
常值,电力拖动系统处于稳定运转状态;
(2)当 ,
, ,电力拖动系统处于加速过渡过程状态中;
,电力拖动系统处于加速过渡过程状态中;
(3) 当 ,
, ,电力拖动系统处于减速过渡过程状态中。
,电力拖动系统处于减速过渡过程状态中。
运动方程式中转矩的符号分析
应用运动方程式,通常以电动机轴为研究对象。由于电动机运转状态的不同以及生产机械负载类型的不同,电动机轴上的拖动转矩及负载转矩不仅大小不同,方向也是变化的。运动方程式可写成下列一般形式:
 (4)
(4)
式(4)中拖动转矩及负载转矩前均带有正负符号,并作如下规定:
如设定电力拖动系统的正方向,则拖动转矩的方向如果与所设定的正方向相同,前带正号,相反时带负号。在式(4)中,由于负载转矩 前已带有负号,因此其正负号的规定恰与拖动转矩的规定相反。即当负载转矩的方向与设定的旋转正方向相同时,负载转矩前取负号,相反时则取正号。本书的计算中,均规定电力拖动系统的正向电动机转向为系统的正方向。
前已带有负号,因此其正负号的规定恰与拖动转矩的规定相反。即当负载转矩的方向与设定的旋转正方向相同时,负载转矩前取负号,相反时则取正号。本书的计算中,均规定电力拖动系统的正向电动机转向为系统的正方向。
上面的规定也可归纳为:拖动转矩与规定正向相同取正,相反取负;负载转矩与规定正向相同取负,相反取正。
惯性转矩的大小及正负符号由拖动转矩及负载转矩的代数和来决定。