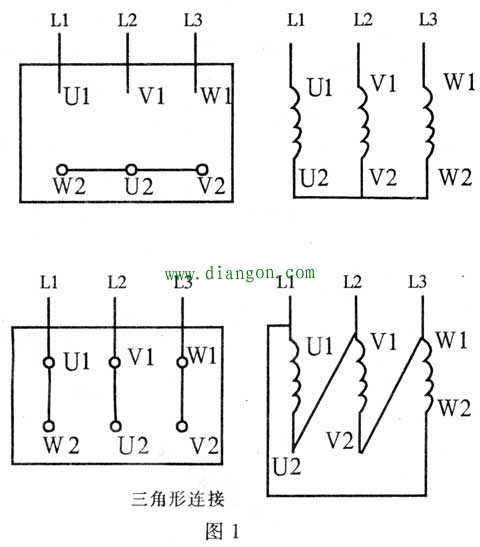
检修或重绕三相异步电动机三相绕组的六条引出线,头、尾必须分清,否则在接线盒内无法正确接线。按规定六条引出线的头、尾分别用U1、V1、W1、U2、V2、W2标注标号(旧标号为D1,D4,D2,D5,D3,D6)。其中U1、U2表示**相绕组的头、尾端;V1、V2表示**相绕组的头、尾端;W1、W2表示第三相绕组的头、尾端。不同字母表示不同相别,相同数字表示同为头或尾。检修电动机时,如果六条引线上标号完整,只有接线盒内接线板损坏,可按电动机铭牌上规定的接法更换接线板,正确接线即可。电动机接线方法分为星形(Y)、三角形(△)两种连接方法。如图l所示。如果六条引线上的标号已被破坏或重绕电动机绕组后,就必须先确定六条引线的头、尾端进行标号,然后再按规定接到接线板上。
绕组头、尾确定的方法如下:
1.用万用表电阻档测量确定每相绕组的两个线端。电阻值近似为零时,两表笔所接为一组绕组的两个端,依次分清三个绕组的各两端。
2.万用表法l。
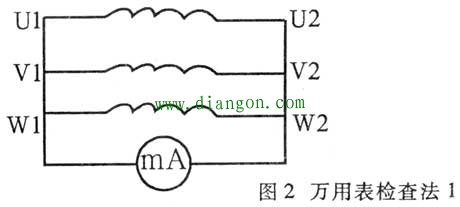
①万用表置mA档,按图2接线。假设一端接线为头(U1、Vl、W1),另一端接线为尾(U2、V2、W2)。
②用手转动转子,如万用表指针不动,表明假设正确。如万用表指针摆动,表明假设错误,应对调其中一相绕组头、尾端后重试,直至万用表不摆动时,即可将连在一起的3个线头确定为头或尾。
3.万用表法2。
①万用表置mA档,按图3接线。
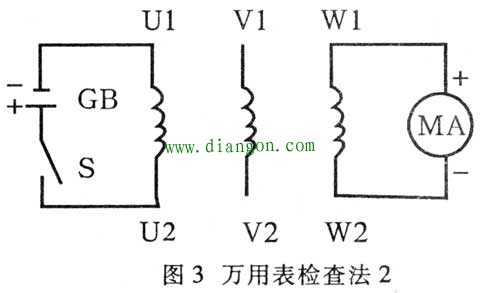
②闭合开关S,瞬间万用表向右摆动则电池正极所接线头与万用表负表笔所接线头同为头或尾。如指针向左反摆则电池正极所接线头与万用表正表笔所接线头同为头或尾。
③将电池(或万用表)改接到第三相绕组的两个线头上重复以上试验,确定第三相绕组的头、尾,以此确定三相绕组各自的头和尾。
4.灯泡检查法1。
①准备一台220/36V降压变压器并按图4接线(小容量电动机可直接接220V交流电源)。
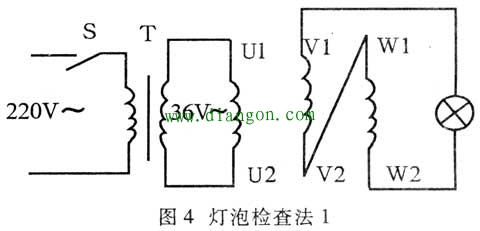
②闭合开关S,如灯泡亮,表明两相绕组为头、尾串联,用在灯泡上的电压是两相绕组感应电动势的矢量和。如灯泡不亮,表明两组绕组为尾、尾或头、头串联,作用在灯泡上的电压是两相绕组感应电动势的矢量差。
③将检查确定的线头作好标记,将其中一相与接36V电源一相对调重试,以此确定三相绕组所有头、尾端。
5.灯泡检查法2。
①按图5接线。
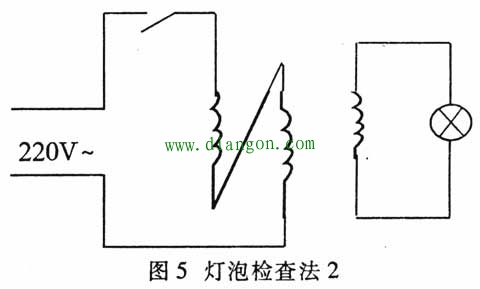
②闭合开关S,如36V灯泡亮,表示接220V电源两相绕组为头、尾串联。如灯泡不亮表示两相绕组为头、头或尾、尾串联。
③将检查确定的线头作好标记,将其中一相与接灯泡一相对调重试,以此确定三相绕组所有头、尾端。