从图1椭圆磁通势时单相异步电动机机械特性可以看出, F+>F-的情况下,当n=0时,T>0,这就是说电功机有正向起动转矩,可以正向起动。当n=0时,T>0,即电动机起动后仍能继续运行。当然,如果F+<F-,则n=0时,T<0;n<0,T<0,即电动机可以反向起动并反向电动运行。
不言而喻,如果两相绕组m和a通入相位相差90°的两相交流电流并产生圆形旋转磁通势,例如当F= F+ ,F-=0时,则电动机T=T+,T-=0,机械待性T=f(s)与三相异步电动机机械特性的情况—样了,由T=0,起动转矩相对地比椭圆磁通势时的大。
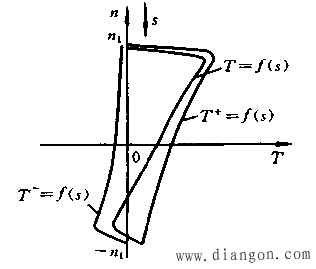
图1 单相异步电动机的起动特性
从上面分析的结果看出,单相异步电动机的关键问题是如何起动的问题。而的必要条件是:
①定子
具有空间不同相位的两个绕组;
②两个绕组中通入不同相位的交流电流。
实际单相异步电动机主绕组m是工作绕组(或称运行绕组),与之差90°空间电角度是副绕组(或称起动绕组)。工作绕组在电动机起动与运行时都一直接在交流电源上,而起动绕组只是在起动时必须通电.起动后可以切除不用。
单相异步电动机之优点主要是使用单相交流电源,但是单相异步电动机起动的必要条件要求两相绕组中通入相位不同的两相电流。如何把工作绕组与起动绕组中的电流相位分开,即所谓的“分相”,就变成了单相异步电动机的十分重要的问题。单相异步电动机的分类,也就是依它不同的分相方法而区别。