来源:本站
导读:目前正在解读《步进电机的暂态转矩特性》的相关信息,《步进电机的暂态转矩特性》是由用户自行发布的知识型内容!下面请观看由(
电工学习网 - www.9pbb.com)用户发布《步进电机的暂态转矩特性》的详细说明。
由于步进电机转子惯量作用,即使空载运行一步,也会产生超越角(over-shoot),并在超越角与返回角(under-shoot)之间来回振荡,经过哀减后静止于所定角度,此为步进电机暂态响应特性。
下图表示步进电机的暂态特性,纵轴取转子移动角度,横轴为时间。△T为上升时间,△θ表示超越角,转子自由静止到设定位置的时间(通常到达步距角的士5%误差范围的时间)称为稳定时间(setting time)。
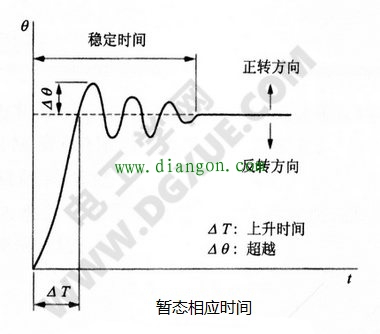
稳定时间越短,快速性越好,为了加快机构的运行速度,使稳定时间变短,步进电机的阻尼(制动)变得很重要。使稳定时间变短的方法有改变摩擦或改变惯量驱动等。
提醒:《步进电机的暂态转矩特性》最后刷新时间 2023-07-10 03:40:40,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《步进电机的暂态转矩特性》该内容的真实性请自行鉴别。