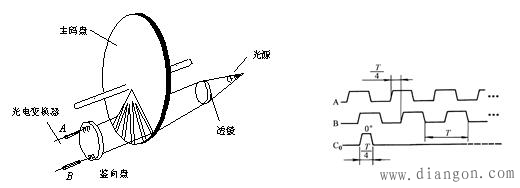
图1 增量式编码器工作原理 图2 光电编码器的输出波形 光电编码器的光源最常用的是自身有聚光效果的发光二极管。当光电码盘随工作轴一起转动时,光线透过光电码盘和光栏板狭缝,形成忽明忽暗的光信号。光敏元件把此光信号转换成电脉冲信号,通过信号处理电路后,向数控系统输出脉冲信号,也可由数码管直接显示位移量。 光电编码器的测量准确度与码盘圆周上的狭缝条纹数n有关,能分辨的角度α为: α=360°/n(1) 分辨率=1/n(2) 例如:码盘边缘的透光槽数为1 024个,则能分辨的最小角度α=360°/1 024=0.352°。 为了判断码盘旋转的方向,必须在光栏板上设置两个狭缝,其距离是码盘上的两个狭缝距离的(m+1/4)倍,m为正整数,并设置了两组对应的光敏元件,如图1中的A、B光敏元件,有时也称为cos、sin元件。当检测对象旋转时,同轴或关联安装的光电编码器便会输出A、B两路相位相差90°的数字脉冲信号。光电编码器的输出波形如图2所示。为了得到码盘转动的绝对位置,还须设置一个基准点,如图1中的“零位标志槽”。码盘每转一圈,零位标志槽对应的光敏元件产生一个脉冲,称为“一转脉冲”,见图2中的C0脉冲。 图3给出了编码器正反转时A、B信号的波形及其时序关系,当编码器正转时A信号的相位超前B信号90°,如图3(a)所示;反转时则B信号相位超前A信号90°,如图3(b)所示。A和B输出的脉冲个数与被测角位移变化量成线性关系,因此,通过对脉冲个数计数就能计算出相应的角位移。根据A和B之间的这种关系正确地解调出被测机械的旋转方向和旋转角位移/速率,就是所谓的脉冲辨向和计数。脉冲的辨向和计数既可用软件实现也可用硬件实现。
图3 光电编码器的正转和反转波形