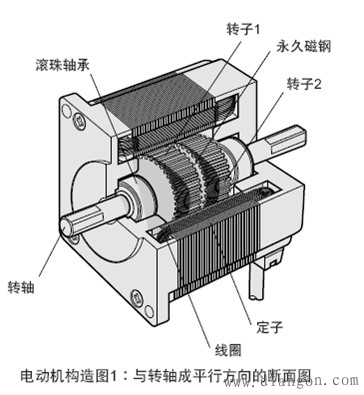
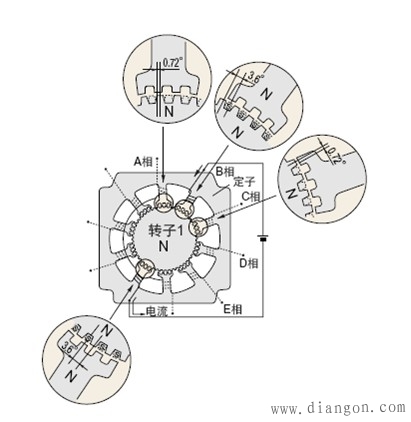
 定子拥有小齿状的磁极,共有 10个,皆绕有线圈。 其线圈的对角位置的磁极相互连接着,电流流通后,线圈即会被磁 化成同一极性。(例如某一线圈经由电流的流通后,对角线的磁极将 同化成 S 极或 N 极。) 对角线的 2个磁极形成 1个相,而由于有 A相至 E相等 5个相位,因此称为 5 相步进电动机。
定子拥有小齿状的磁极,共有 10个,皆绕有线圈。 其线圈的对角位置的磁极相互连接着,电流流通后,线圈即会被磁 化成同一极性。(例如某一线圈经由电流的流通后,对角线的磁极将 同化成 S 极或 N 极。) 对角线的 2个磁极形成 1个相,而由于有 A相至 E相等 5个相位,因此称为 5 相步进电动机。
 系统构成图示
系统构成图示
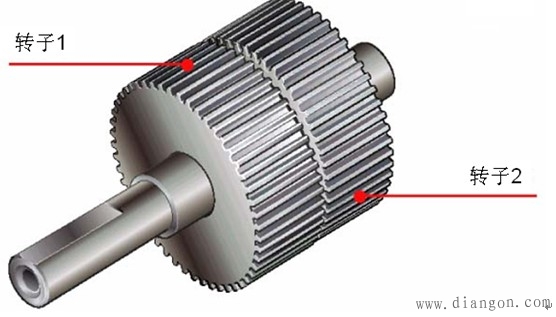 转子的外圈由 50个小齿构成,转子 1 和转子 2 的小齿于构造上互 相错开 1/2 螺距。由此转子形成了100个小齿。目前已经有转子单个加工至100齿的高分辨率型,那么高分辨率型的转子就有200个小齿。因此其机械上就可以实现普通步进电机半步(普通步进电机半步需要电气细分达到)的分辨率。
转子的外圈由 50个小齿构成,转子 1 和转子 2 的小齿于构造上互 相错开 1/2 螺距。由此转子形成了100个小齿。目前已经有转子单个加工至100齿的高分辨率型,那么高分辨率型的转子就有200个小齿。因此其机械上就可以实现普通步进电机半步(普通步进电机半步需要电气细分达到)的分辨率。
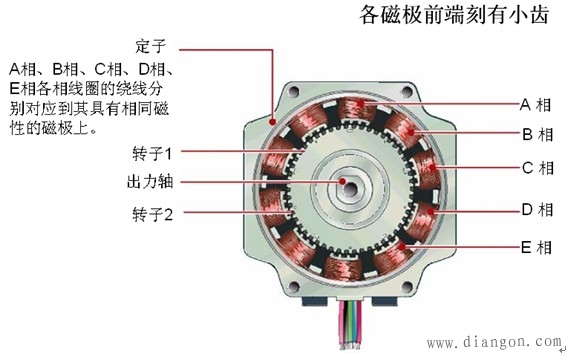 电动机构造图2∶与转轴成垂直方向的断面图
二、步进电机的运转原理。
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 首先解释励磁,励磁就是指电动机线圈通电时的状态。
● A相励磁
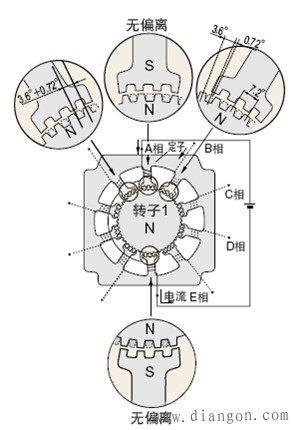
将 A 相励磁,会使得磁极磁化成 S 极,而其将与带有 N极磁性的 转子 1 的小齿互相吸引,并与带有S极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 B相磁极的小齿和带有 S极磁性 的转子 2 的小齿互相偏离 0.72°。以上是 A 相励磁时的定子和转子小齿的位置关系。
电动机构造图2∶与转轴成垂直方向的断面图
二、步进电机的运转原理。
实际上经过磁化后的转子及定子的小齿的位置关系,在此说明如下。 首先解释励磁,励磁就是指电动机线圈通电时的状态。
● A相励磁
将 A 相励磁,会使得磁极磁化成 S 极,而其将与带有 N极磁性的 转子 1 的小齿互相吸引,并与带有S极磁性的转子 2 的小齿相斥, 于平衡后停止。此时,没有励磁的 B相磁极的小齿和带有 S极磁性 的转子 2 的小齿互相偏离 0.72°。以上是 A 相励磁时的定子和转子小齿的位置关系。
 ● B相励磁
其次由 A 相励磁转为 B 相励磁时,B 相磁极磁化成 N 极,与拥有 S极磁性的转子 2 互相吸引,而与拥有 N极磁性的转子 1 相斥。
● B相励磁
其次由 A 相励磁转为 B 相励磁时,B 相磁极磁化成 N 极,与拥有 S极磁性的转子 2 互相吸引,而与拥有 N极磁性的转子 1 相斥。
 也就是说,从 A 相励磁转换至 B 相励磁时,转子转动 0.72°。由此可知, 励磁相位随 A相→ B相→ C相→ D相→ E相→ A相依次转换,则步进电动机以每次 0.72°做正确的转动。同样的,希望作反方向转动时,只需将励磁顺序倒转,依照 A相→ E相→ D相→ C相→ B相→ A相励磁即可。
0.72°的高分辨率,是取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确的定位。下图就5相步进每次的位移量是0.72°进行更详细的说明:
也就是说,从 A 相励磁转换至 B 相励磁时,转子转动 0.72°。由此可知, 励磁相位随 A相→ B相→ C相→ D相→ E相→ A相依次转换,则步进电动机以每次 0.72°做正确的转动。同样的,希望作反方向转动时,只需将励磁顺序倒转,依照 A相→ E相→ D相→ C相→ B相→ A相励磁即可。
0.72°的高分辨率,是取决于定子和转子构造上的机械偏移量,所以不需要编码器等传感器即可正确的定位。下图就5相步进每次的位移量是0.72°进行更详细的说明:
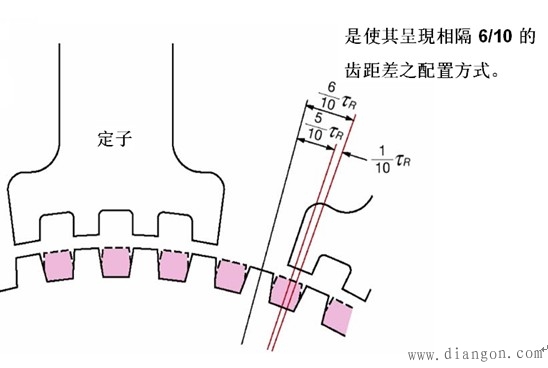 由于第一组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,但是各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。因此普通5相步进的步距角为:360°/50齿/10=0.72°
高分辨率5相步进的步距角为:360°/100齿/10=0.36°
另外,就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,因此可获得 ±3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线圈同时进行 4相或 5相励磁的。
三、步进电动机的特征
1、运转需要的三要素:控制器、驱动器、步进电动机
由于第一组定子正好与转子相对应吸引。就势必会导致第二组定子与对应的转子相偏离(定子与转子齿距一样,但是各自所在的2个圆不一样大)。而这个偏离值正好是齿距的十分之一。因此普通5相步进的步距角为:360°/50齿/10=0.72°
高分辨率5相步进的步距角为:360°/100齿/10=0.36°
另外,就停止精度而言, 会影响的只有定子与转子的加工精度、组装精度、及线圈的直流电阻的不同等而已,因此可获得 ±3 分(无负载时)的高停止精度。 实际上步进电动机是由驱动器来进行励磁相的转换,而励磁相的转换时机则是由输入驱动器的脉冲信号所进行。以上举的是 1相位励磁的例子,实际运转时,为有效利用线圈同时进行 4相或 5相励磁的。
三、步进电动机的特征
1、运转需要的三要素:控制器、驱动器、步进电动机
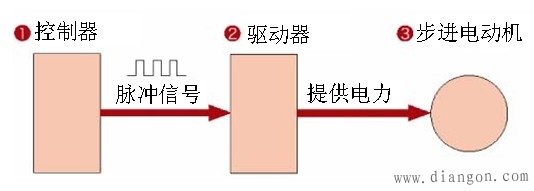 以上三部分是步进电机运转必不可少的三部分。控制器又叫脉冲产生器,目前主要有plc、单片机、运动板卡等等。
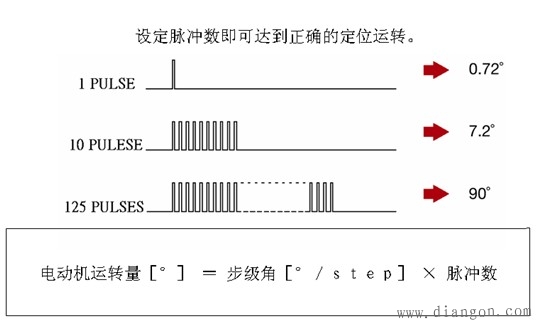
2、运转量与脉冲数的比例关系
以上三部分是步进电机运转必不可少的三部分。控制器又叫脉冲产生器,目前主要有plc、单片机、运动板卡等等。
2、运转量与脉冲数的比例关系
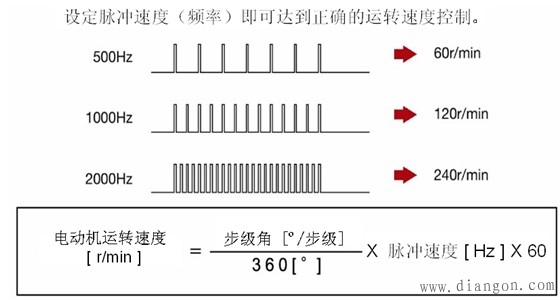
 3、运转速度与脉冲速度的比例关系
3、运转速度与脉冲速度的比例关系
 4、本身具有保持力
步进电机只有在通电状况下,才具备自我保持力。在停电状况下 ,自我保持力消失。
因此在升降设备传动时,务必使用附电磁刹车型步进电机。
四、结束语
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下就能使用。它必须由脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。但是万丈高楼平地起,从步进电机的基础开始学习,无疑为将来的应用打好扎实的基础。
4、本身具有保持力
步进电机只有在通电状况下,才具备自我保持力。在停电状况下 ,自我保持力消失。
因此在升降设备传动时,务必使用附电磁刹车型步进电机。
四、结束语
虽然步进电机已被广泛地应用,但步进电机并不能像普通的直流电机,交流电机在常规下就能使用。它必须由脉冲信号、功率驱动电路等组成控制系统方可使用。因此用好步进电机却非易事,它涉及到机械、电机、电子及计算机等许多专业知识。但是万丈高楼平地起,从步进电机的基础开始学习,无疑为将来的应用打好扎实的基础。