导读:目前正在解读《数控机床伺服进给系统的基本形式》的相关信息,《数控机床伺服进给系统的基本形式》是由用户自行发布的知识型内容!下面请观看由(电工学习网 - www.9pbb.com)用户发布《数控机床伺服进给系统的基本形式》的详细说明。
数控机床所采用的伺服进给系统按控制系统的结构可以分为开环控制、闭环控制、半闭环控制以及混合控制4种。
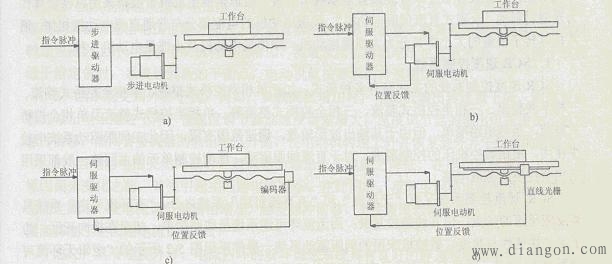
无位置反馈装置的伺服进给系统称为开环控制系统。使用步进电动机(包括电液脉冲马达)作为伺服执行元件,是其最明显的特点。在开环控制系统中,数控装置输出的脉冲,经过步进驱动器的环形分配器或脉冲分配软件的处理,在驱动电路中进行功率放大后控制步进电动机,最终控制了步进电动机的角位移。步进电动机再经过减速装置(或直接连接)带动了丝杠旋转,通过丝杠将角位移转换为移动部件的直线位移。因此,控制步进电动机的转角与转速,就可以间接控制移动部件的移动速度与位移量。图1a为开环控制伺服驱动系统的结构原理图。
采用开环控制系统的数控机床结构简单,制造成本较低,但是由于系统对移动部件的实际位移量不进行检测,因此无法通过反馈自动进行误差检测和校正。另外,步进电动机的步距角误差、齿轮与丝杠等部件的传动误差,最终都将影响被加工零件的精度;特别是在负载转矩超过电动机输出转矩时,将导致步进电动机的“失步”,使加工无法进行。因此,开环控制仅适用于加工精度要求不高,负载较轻且变化不大的简易、经济型数控机床上。
半闭环控制数控机床的特点是:机床的传动丝杠或伺服电动机上装有角位移检测装置(如:光电编码器等),通过它可以检测电动机或丝杠的转角,从而间接地检测了移动部件的位移。角位移信号被反馈到数控装置或伺服驱动中,实现了从位置给定到电动机输出转角间的闭环自动调节。同样,由于伺服电动机和丝杠相连,通过丝杠可以将旋转运动转换为移动部件的直线位移,因此间接地控制了移动部件的移动速度与位移量。这种结构只对电动机或丝杠的角位移进行了闭环控制,没有实现对最终输出的直线位移的闭环控制,故称为“半闭环”控制系统。
采用半闭环控制系统的数控机床,电气控制与机械传动间有明显的分界,因此调试、维修与故障诊断较方便;且机械部分的间隙、摩擦死区、刚度等非线性环节都在闭环以外,因此系统的稳定性较好。伺服电动机和光电编码器通常做成一体,电动机和丝杠间可以直接联接或通过减速装置联接;位置检测单位和实际最小移动单位间的匹配,可以通过数控系统的参数(通常被称为“电子齿轮比”)进行设置。它具有传动系统简单、结构紧凑、制造成本低、性能价格比高等特点,从而在数控机床上得到了广泛应用。
图1b、c为半闭环控制数控机床伺服驱动部分的结构原理图。图1b为伺服电动机内装编码器的情况,图1c为编码器安装于丝杠上的情况。
提醒:《数控机床伺服进给系统的基本形式》最后刷新时间 2023-07-10 03:59:18,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《数控机床伺服进给系统的基本形式》该内容的真实性请自行鉴别。