机电一体化对机械系统的基本要求:
(1)、转动惯量(J)小
(2)、刚度(K)大
(3)、阻尼(B)合适
机械系统的组成:传动机构、导向机构、执行机构。
传动装置功能:传递运动(速度、位移)和动力(力、力矩)
滚珠丝杠:丝杠和螺母的螺纹滚道间置滚珠,当丝杠或螺母转动时,滚珠沿螺纹滚道滚动,使丝杠和螺母作相对运动时为滚动摩擦。
在螺母(或丝杠)上有滚珠返回的通道,与螺纹滚道形成循环回路,使滚珠在螺母滚道内循环。
滚珠丝杠按滚珠的循环方式不同分为内循环类型和外循环类型
滚珠丝杠的特点:
1、传动效率高
2、运动具有可逆性
3、传动精度高
4、磨损小,使用寿命长
5、制造工艺复杂,成本高
6、不能自锁
调整滚珠丝杠轴向间隙的结构形式:垫片调隙式、螺纹调隙式、齿差调隙式、 变位螺距调隙式
滚珠丝杠的主要尺寸:公称直径(滚珠中心圆直径)、导程(或螺距)、螺旋升角、滚珠直径、螺纹滚道半径、丝杠外径、丝杠内径、螺母外径、螺母内径等。
滚珠丝杠的公差等级:根据JB316.2-91《滚珠丝杠副精度》标准规定分为5个等级:1、2、3、4、5级(有的参考书称7个等级,另外有7、10级),1级最高,5级最低。一般动力传动选4、5级,数控机床、精密机械或仪器选1、2、3级。
为保证滚珠丝杠副传动的刚度和精度,应选择合适的支承方式,选用轴承组合,一般常用推力轴承和向心球轴承。
四种典型的支承方式:
(1)、单推—单推
(2)、双推—双推
(3)、双推—简支
(4)、双推—自由
滚珠丝杠设计计算:
(1)、求出计算载荷
(2)、根据寿命计算出额定动载荷
(3)、查滚珠丝杠副系列中的额定动载荷
(4)、验算传动效率、刚度、稳定性等
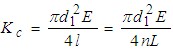
滚珠丝杠副传动刚度由三部分组成:滚珠丝杠的拉压刚度
(1)拉压刚度
a、一端固定,一端自由
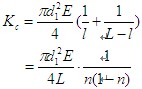
b、两端固定
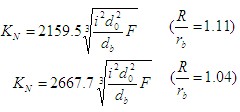
(2)接触刚度KN
(3)支承刚度包括轴承轴向刚度
滚珠丝杠副传动的力学模型可以简化为如下所示的弹簧质量系统:
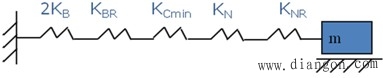
传动系统的传动刚度为:
齿轮传动作用:用来传递转矩和转速。
齿轮传动优点:
1、瞬时传动比恒定,传动精确度高;
2、强度大能承受重载,结构较紧凑;
3、满足主轴进给速度要求,增大主轴转矩。
齿轮传动缺点:
1、齿侧间隙对传动精度影响;
2、齿轮的磨损引起反转误差的逐渐扩大。
齿轮传动的类型:
1、直齿圆柱齿轮传动
a 偏心轴套调整法
b 轴向垫片调整法
c 双片薄齿轮错齿调整法
2、斜齿轮传动
3、齿轮齿条传动
4、锥齿轮传动
(a) 轴向压簧调整法
(b) 周向弹簧调整法
齿轮传动传动链的级数和级比的选择总原则:尽量采用较大传动比的单级传动。
多级传动时,遵循如下的原则:
1、最小等效转动惯量原则
2、输出轴转角误差最小原则
3、重量最轻原则
谐波齿轮传动原理是利用行星轮系传动原理,波发生器转动,迫使柔性齿轮产生可控制的变形波(近似谐波),并和刚轮作用引起齿间相对位移,传递运动和动力。
谐波齿轮由三个基本构件组成:波发生器、柔轮、刚轮,其实质是一种新型减速器。
谐波齿轮传动优点:
1、传动比大:1.002~1.02或50~500;
2、承载能力高;
3、传动平稳,精度高;
4、体积小,噪声低
谐波齿轮传动缺点:
1、柔轮周期性变形,易疲劳破坏;
2、转动惯量和启动力矩大,不适宜于小功率传动;
3、不能用于传动比较小场合(
4、散热差
谐波齿轮广泛应用于机电一体化产品中,如机器人、机器仪表、雷达中用作运动传递;在冶金、化工、起重运输设备中传递运动和转矩。
同步齿形带传动的特点:
1、传动比比准确,传动效率高;
2、工作平稳,能吸收振动;
3、传动比范围大;
4、中心距严格,成本高;
5、不需润滑,耐油、耐高温,维护方便。
同步齿形带由强力层和基体(带齿、带背)组成,强力层的材料为钢丝、玻璃纤维、芳纶,基体材料为聚氨脂橡胶、氯丁橡胶。
同步齿形带的主要参数和规格:
带齿的节距t(或
节线(
根据节距不同分为七种规格:

同步带的标记包括长度代号、型号、宽度代号等。
同步带的按用途分为
(a)一般工业用同步带传动
即梯形齿同步带传动。它主要用于中、小功率的同步带传动,如各种仪器、计算机、轻工机械中均采用这种同步带传动。
(b) 高转矩同步带传动
又称HTD带(High Torque Drive)或STPD带传动(Super Torque Positive Drive)。由于其齿形呈圆弧状,在我国通称为圆弧齿同步带传动。它主要用于重型机械的传动中,如运输机械(飞机、汽车)、石油机械和机床、发电机等的传动
(c) 特种规格的同步带传动
这是根据某种机器特殊需要而采用的特种规格同步带传动,如工业缝纫机用的、汽车发动机用的同步带传动
(d) 特殊用途的同步带传动
同步带的按规格制度分为
(a) 模数制
同步带主要参数是模数m(与齿轮相同),根据不同的模数数值来确定带的型号及结构参数。在60年代该种规格制度曾应用于日、意、苏等国,后随国际交流的需要,各国同步带规格制度逐渐统一到节距制。目前仅前苏联及东欧各国仍采用模数制。
(b) 节距制
即同步带的主要参数是带齿节距,按节距大小不同,相应带、轮有不同的结构尺寸。该种规格制度目前被列为国际标准。
由于节距制来源于英、美,其计量单位为英制或经换算的公制单位。
(c) DIN米制节距
DIN米制节距是德国同步带传动国家标准制定的规格制度。其主要参数为齿节距,但标准节距数值不同于ISO节距制,计量单位为公制。在我国,由于德国进口设备较多,故DIN米制节距同步带在我国也有应用。
同步带轮的材料:铸铁或钢(一般情况)
塑料或铝合金(高速小功率)
同步带轮的参数及尺寸规格
(1)齿形:与梯形齿同步带匹配,齿形有直线形和渐开线形两种。
(2)齿数:齿数少则结构紧凑,但齿数太少易产生弯曲和疲劳破坏,按国标GB11361-89规定,小带轮应有许用最小齿数(参阅有关标准)。
同步带轮的标记由带轮齿数、带的型号、轮宽代号表示。例:30 L 075。
同步带传动的设计准则是根据齿形带的强度准则进行,限制齿形带单位宽度的拉力,防止强力层的疲劳破坏、断裂以及节距改变而爬齿等。
同步带传动主要失效形式:
(a) 承载绳断裂 原因是带型号过小和小带轮直径过小等。
(b) 爬齿和跳齿 原因是同步带传递的圆周力过大、带与带轮间的节距差值过大、带的初拉力过小等。
(c) 带齿的磨损 原因是带齿与轮齿的啮合干涉、带的张紧力过大等。
(d) 其他失效方式 带和带轮的制造安装误差引起的带轮棱边磨损、带与带轮的节距差值太大和啮合齿数过少引起的带齿剪切破坏、同步带背的龟裂、承载绳抽出和包布层脱落等。
根据强度准则计算齿形带宽度的公式为:

已知条件及设计内容
初始数据: 功率P、转速n、传动比
计算内容为:(1)确定计算功率
(2)确定模数m:根据
(3)确定小带轮齿数Z1、大带轮齿数Z2及节圆直径D1、D2
根据小带轮转速n1及所选模数,查有关标准(带轮最少许用齿数表),选取小带轮的齿数Z1,使
(4)校核带的速度v
(5)确定中心距a、带长
(6)根据设计准则确定齿形带宽度b
(7)确定作用在轮轴上的力Fs
(8)确定带轮的结构尺寸(结构、参数、材料、尺寸等)