通过这一部分的学习,能够掌握机床坐标系、编程坐标系、加工坐标系的概念,具备实际动手设置机床加工坐标系的能力。
1、坐标和运动方向命名原则
特规定:永远假定刀具相对于静止的工件坐标系运动。
2、标准坐标系的规定
为确定机床的运动方向,移动的距离,要在机床上建立一个坐标系——标准坐标系(机床坐标系)。编制程序时,以该坐标系来规定运动方向和距离。标准机床坐标系中X、Y、Z坐标轴的相互关系用右手笛卡尔直角坐标系决定。
3、运动方向的确定
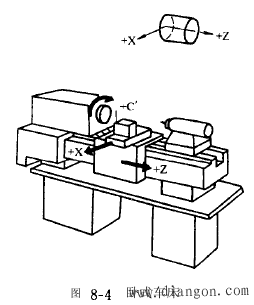
(1)Z坐标: Z坐标的运动方向是由传递切削动力的主轴所决定的,即平行于主轴轴线的坐标轴即为Z坐标,Z坐标的正向为刀具离开工件的方向
(2)X坐标
|
X坐标平行于工件的装夹平面,一般在水平面内。确定X轴的方向时,要考虑两种情况: |
工件做旋转运动 |
则刀具离开工件的方向为X坐标的正方向 |
|
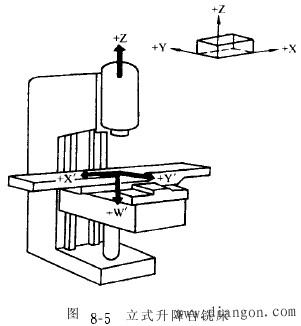
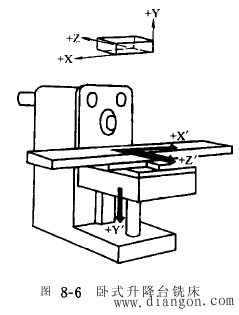
刀具做旋转运动,则分为两种情况: |
Z坐标垂直时,观察者面对刀具主轴向立柱看时,+X运动方向指向右方 | |
|
Z坐标水平时,观察者沿刀具主轴向工件看时,+X运动方向指向右方 |
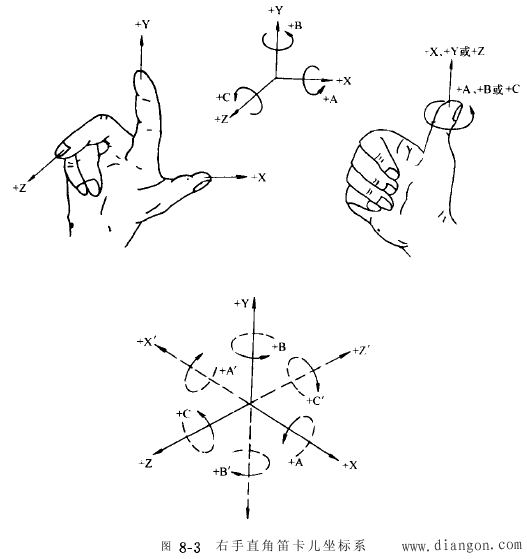

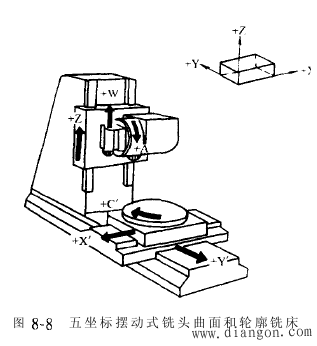
(4)围绕X、Y、Z坐标旋转的旋转坐标分别用A、B、C表示,根据右手螺旋定则,大拇指的指向为X、Y、Z坐标中任意轴的正向,则其余四指的旋转方向即为旋转坐标A、B、C的正向。
(5)、附加坐标系
为了编程和加工的方便,有时还要设置附加坐标系。对于直线运动,通常建立的附加坐标系有:
1)指定平行于X、Y、Z的坐标轴
可以采用的附加坐标系:第二组U、V、W坐标,第三组P、Q、R坐标。
2) 指定不平行于X、Y、Z的坐标轴
也可以采用的附加坐标系:第二组U、V、W坐标,第三组P、Q、R坐标。
(6)对于工件运动相反方向
工件运动而不是刀具运动的机床,必须将前述刀具运动作相反安排。+X与+X‘相反。
(7)主轴旋转运动方向 主轴顺时针正转