在大型建筑工地上,当原料堆放较远,使用很不方便时,可采用皮带运输机来运送粉料。利用皮带传送机构把粉料运送到施工现场或送入施工机械中加工,这既省时又省力。如下图所示是一种多条皮带运输机控制电路。电路采用两台电动机拖动,这是一个两台电动机顺序起动,反顺序停止的控制电路。
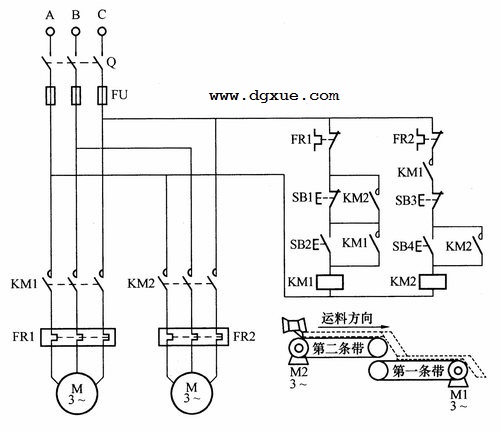
皮带运输机电路
为了防止运料皮带上运送的物料在带上堆积堵塞,在控制上要求:先起动第一条运输带的电动机M1,当M1运转后才能起动第二条皮带运输电动机M2,这样能保证首先将第一条运输带上的物料先清理干净,来料后能迅速运走,不至于堵塞。停止皮带运输时,要先停止第二条带,然后才能停止第一条皮带。
起动时,先按下起动按钮SB2时,接触器KM1得电吸合并自锁,其主触点闭合,使电动机M1运转,第一条皮带开始工作。KM1的另一个辅助常开触点闭合,为KM2通电做准备,这时再按下起动按钮SB4,接触器KM2得电动作,M2运转,第二条皮带投入运行。
停止运输时,先按下停止按钮SB3,接触器KM2断电释放,M2停转,第二条皮带停止运输。再按下SB1,KM1断电释放,M1停转,第一条皮带也停止运输。
由于在KM2线圈回路串联了KM1的常开辅助触点,使得在KM1未得电前,KM2不得电;而又在停止按钮SB1上并联上KM2的常开辅助触点,能保证只有KM2先断电释放后,KM1才能断电释放。这就保证了第一条皮带先工作,第二条才能开始工作;第二条带先停止,第一条才能停止。防止了物料在皮带上的堵塞。