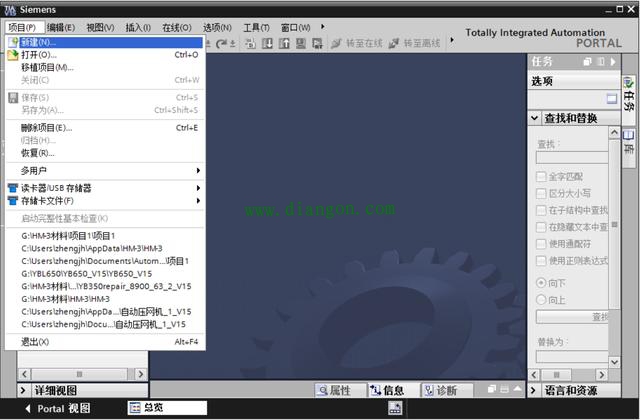
首先打开博途V15.0软件,选择新建项目。
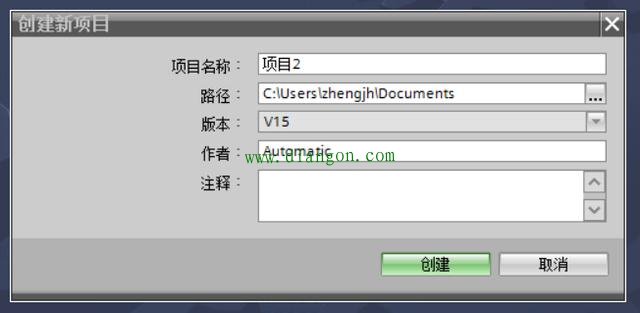
在对话框中输入项目名称,存储路径,作者名字等,点击"创建"。
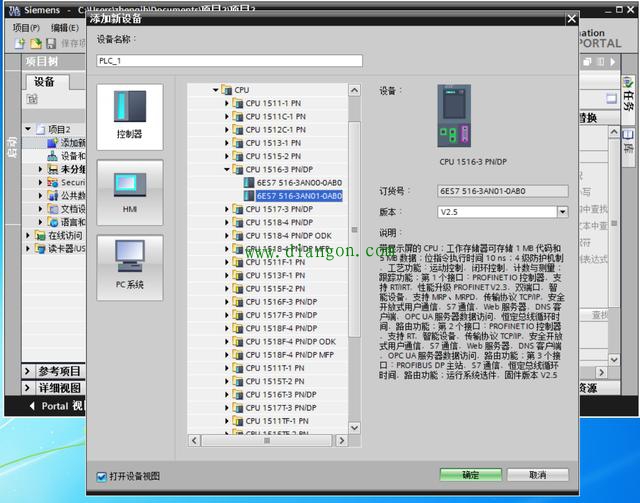
创建好项目后在项目树中点击"添加新设备",出现的对话框中选择"控制器",然后找到使用的PLC型号和版本,此处使用CPU1516-3的最新版本。
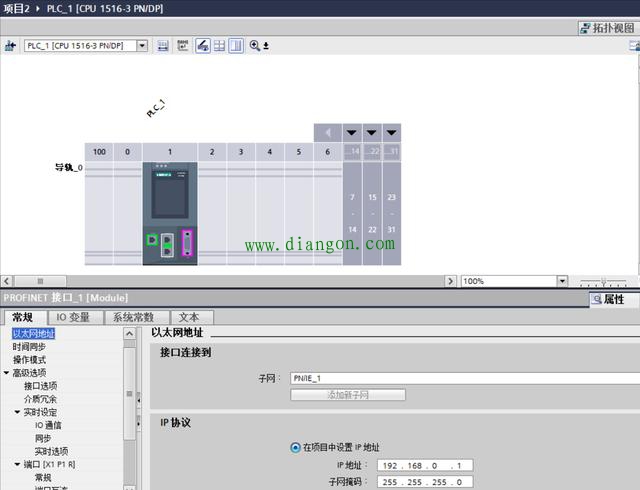
点击确定后出现硬件组态画面,给PLC设定子网参数,此处使用默认值。
然后添加驱动信息,根据下图所示找到使用的驱动型号。此处使用Cu310-2。
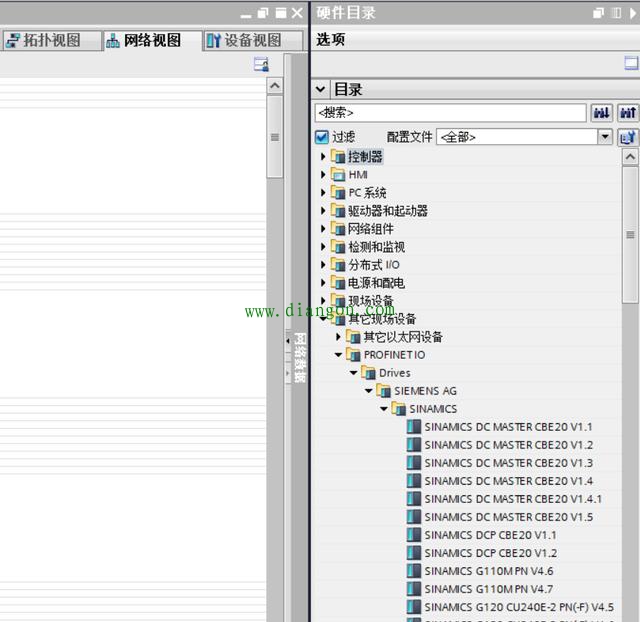
选好后拖拽到硬件组态中,然后设定总线使用之前PLC创建的PN1。

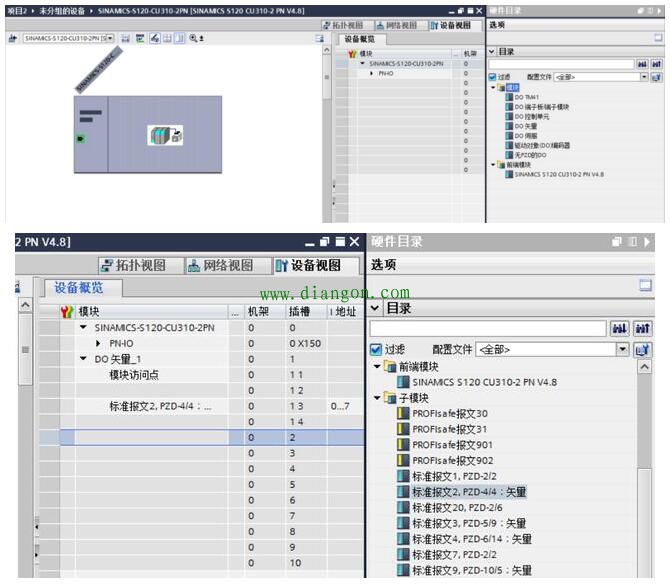
对驱动控制器进行配置,选择矢量类型,标准报文2。
在工艺对象目录下点击新增对象,找到运动控制的速度轴对象,添加。
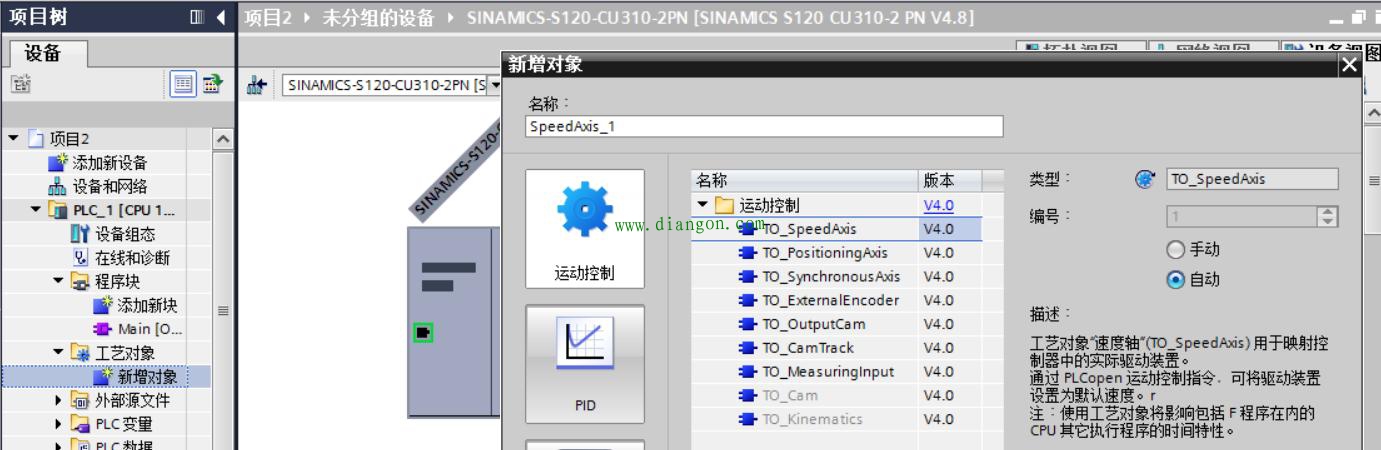
速度轴的对话框中可以选择基本参数、硬件接口以及扩展参数。

在硬件接口中选择前面硬件组态中添加的Cu310。

选择"运行时自动应用驱动值"。

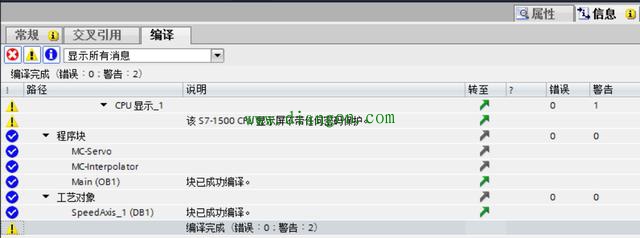
配置完毕后点击编译按钮,对项目进行编译。
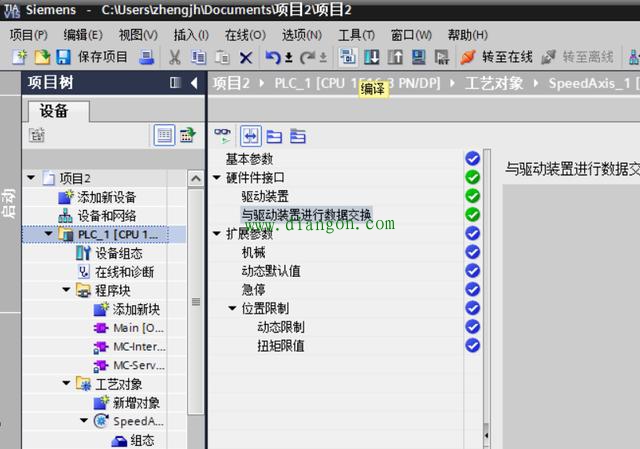
结果在软件下方显示,没有错误。
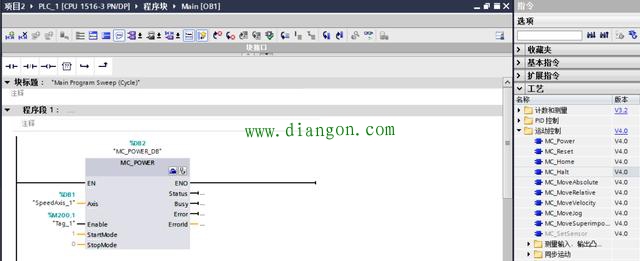
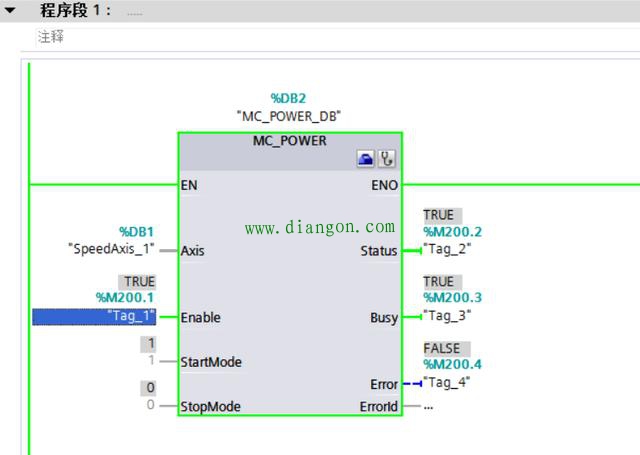
在OB1中添加功能块,MC_POWER,在Axis输入端选择之前添加的速度轴。
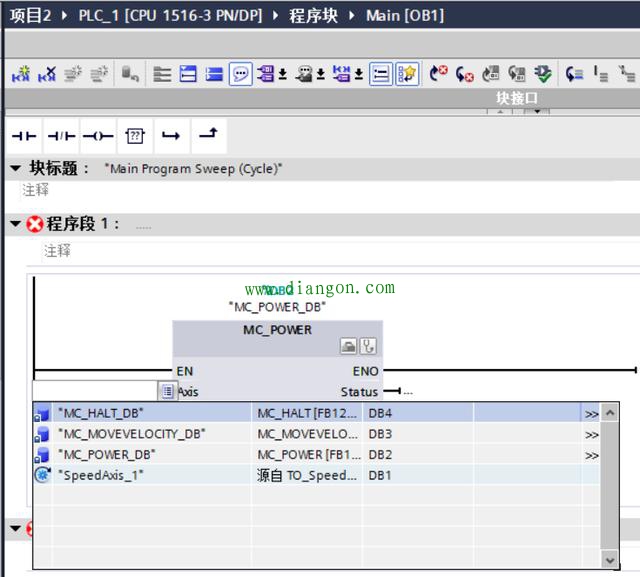
将各个输入输出引脚配置相应的变量。
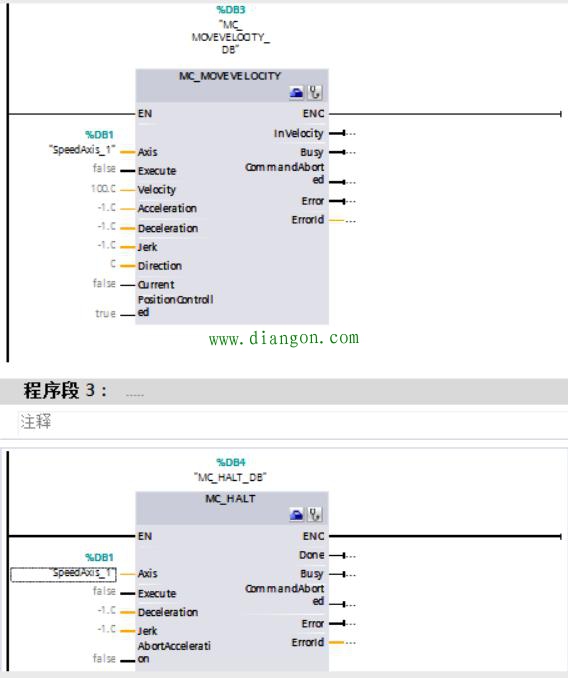
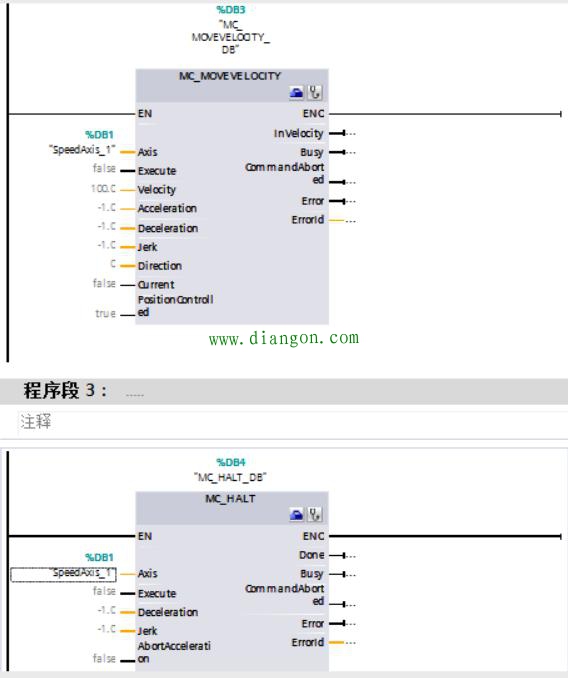
后面再添加MC_MOVEVELOCITY和MC_HALT。分别用于控制轴的启动和停止。
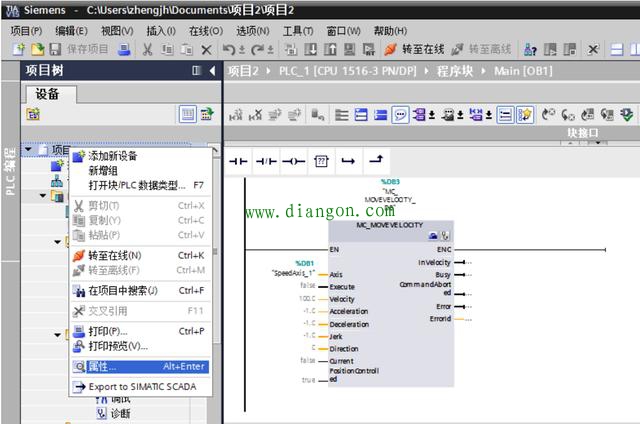
配置完毕后右键点击项目,选择属性。
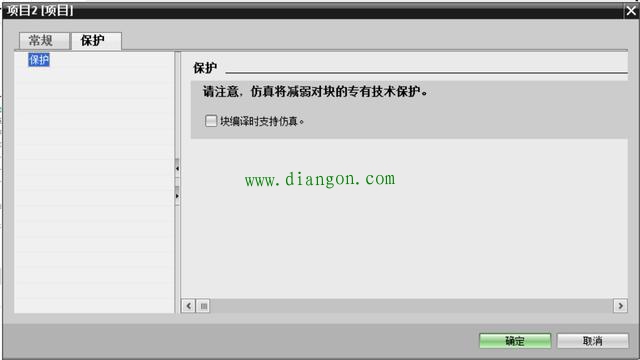
对话框中选择"块编译时支持仿真",否则后面仿真会报错。
运行仿真软件,选择PLC为SIM-1500。
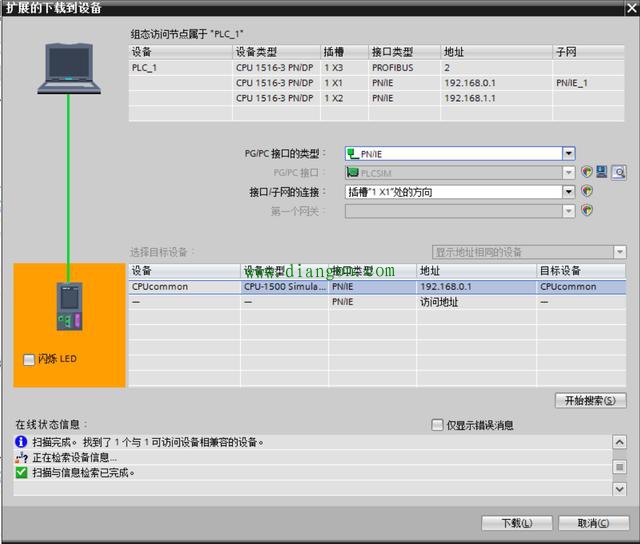
在扩展下载对话框中可以找到模拟运行的PLC。

下载项目,选择启动模块。
监控项目给功能块使能。

启动运行。默认速度为100转/分。
在诊断界面可以进行监控实际速度。
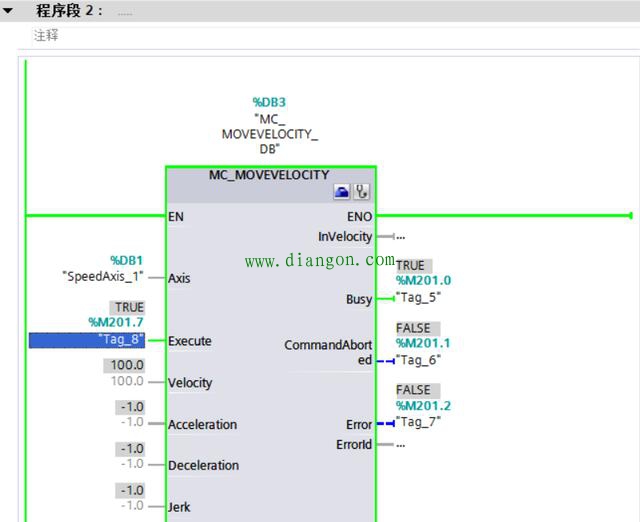
如果要停止就给MC_HALT功能块信号。要注意使用该速度功能块不能连续调整速度。每次设定速度值后需要再次给Execute信号。