IPM是将主开关器件、续流二极管、驱动电路、过电流保护电路、过热保护电路和短路保护电路以及驱动电源不足保护电路、接口电路等集成在同一封装内,形成的高度集成的智能功率集成电路。
IPM的主要特点
1.驱动电路
在IPM内部设置了高性能的驱动电路,具有出现故障后自动软关断IGBT的功能,同时,由于结构紧凑,驱动电路与IGBT之间距离极短,抗干扰能力强,输出阻抗又很低,不需要加反偏电压,简化了驱动电路电源,仅需提供1组下桥臂的公共电源和3组上桥臂的独立“浮地”电源。
2.欠电压保护
每个驱动电路都具有欠电压(UV)保护功能。无论什么原因,只要驱动电路电源电压Ucc低于欠电压阀值Uuv时间超过10ms,IPM就会关断,同时输出一个故障报警信号。
3.过热保护
IPM内部绝缘基板上设有温度传感器,当温度超过过热断开阀值时,IPM内部的保护电路就会阻止门极驱动信号,不接受控制输入信号,直至过热现象消失,保护器件不受损坏,同时输出过热故障信号。当温度下降到过热复位阀值时,电路自动恢复正常工作。
4.过电流、短路保护
IPM中的IGBT电流传感器是射极分流式,采样电阻上流过的电流很小,但与流过开关器件上的电流成正比例关系,从而取代了大功率电阻、电流互感器、霍尔电流传感器等电流监测组件。如果IPM中任意一IGBT的C极电流大于过电流动作电流10μs时,IPM将软关断,并且输出过电流报警信号。
5.制动电路
IPM中设有IGBT组成的制动电路。当IPM接收到制动信号后,制动电路中的IGBT导通,接在制动端BN的制动电阻吸收电能,制动电路工作。
6.使用方便
IPM采用陶瓷绝缘结构,直接安装在绝缘板上。直流输入(P、N)、制动单元输出(B)和变频器输出端子直接用螺钉连接;输入、输出控制端子并排成一列,可用通用插座连接。所以主接线端子和控制端接线端子都可以直接拆卸,不需要烙铁焊接,非常方便。
IPM内部的基本结构和原理
1.IPM内部基本结构原理
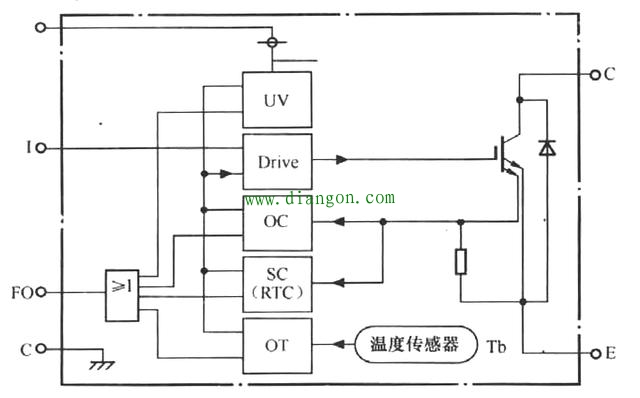
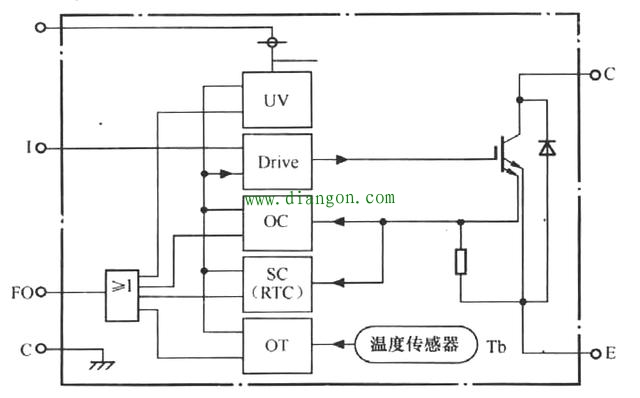
图一 IPM内部的基本结构原理图
如图一所示:图中UV为欠压保护单元、OC为过电流保护单元、SC为短路保护单元、OT为过热保护单元,这些保护单元的输出信号作为或门输入信号。4种保护单元中只要有一种保护单元发生故障,IPM就会输出故障信号。图中Drive为驱动放大单元,从图中可以看出驱动放大单元一方面将接收到的控制信号进行放大输出,驱动IGBT控制极;同时,可以接收任一故障保护电路的信号,一旦接收到故障保护电路的信号,便输出软关断驱动信号去软关断IGBT,使IGBT受到保护。
2.IPM内部结构原理
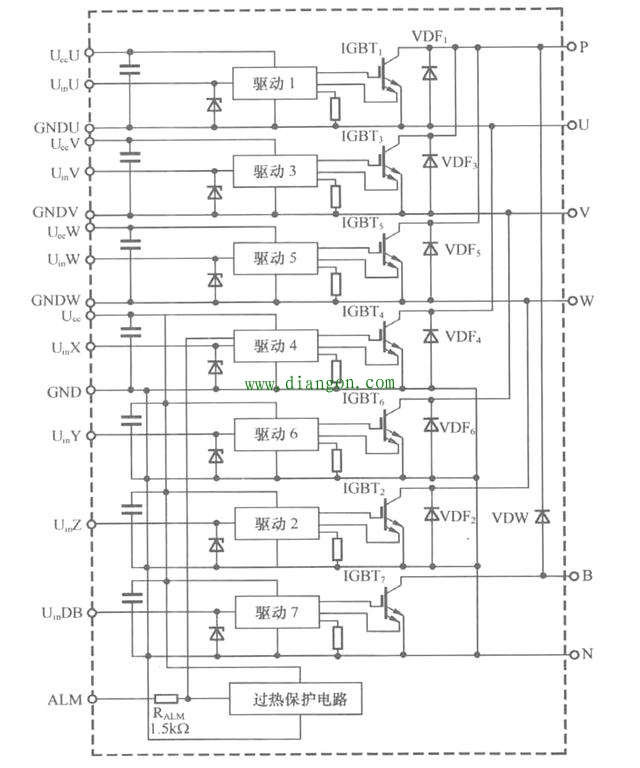
图二 IPM内部结构原理图
由图二可见IGBT1~IGBT6组成逆变桥,VDF1~VDF6分别为6个IGBT的续流二极管。其中IGBT1~IGBT3为上桥臂开关器件,由3个单独“”浮地直流电源给3组控制电路供电;IGBT4~IGBT6为下桥臂开关器件,3组控制电路由一组直流电源供电;IGBT7为制动电路开关器件,VDW是它的续流二极管,内部具有门极驱动控制、故障检测和多种保护电路。内部故障保护电路若检测到过电流、欠电压、过热和短路故障中的任一故障,IPM就会自行软关断,同时送出故障报警信号。
IPM各端子符号和含义
UinU:上桥臂U相控制信号输入端;
UccU:上桥臂U相驱动电源输入端,UccU为“+”端,GND U为“-”端;
UinV:上桥臂V相控制信号输入端;
UccV:上桥臂V相驱动电源输入端,UccV为“+”端,GND V为“-”端;
UinW:上桥臂W相控制信号输入端;
UccW:上桥臂W相驱动电源输入端,UccW为“+”端,GND W为“-”端;
Ucc:下桥臂共用驱动电源(Ucc)输入端,Ucc为“+”端,GND 为“-”端;
UinDB:制动控制信号输入端;
UinX:下桥臂X相控制信号输入端;
UinY:下桥臂Y相控制信号输入端;
UinZ:下桥臂Z相控制信号输入端;
ALM:保护电路动作时的输出端;
P、N:变频装置整流、平波后主电源(Ud)输入端,P为“+”端,N为“-”端;
B:制动输出端子,减速时可以释放再生电能的端子;
U、V、W:变频器三相输出端。