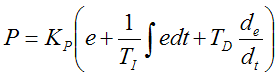
公式中:P为控制器的输出信号;e为偏差信号;KP、TI、TD分别是控制器的比例增益、积分时间和微分时间。
当采集周期T0相对于输入信号变化周期很小时,可用矩形法来求积分的近似值,用一阶的差分来代替微分。经替换最终就可得到离散PID的表达式,离散PID的表达式通常有:位置型,即PID运算控制调节阀的开度;增量型,即PID运算控制调节阀开度的增量(阀位的改变量);速度型,即PID运算控制伺服机的旋转速度。在计算机控制中增量型算式由于易于实现手动和自动的无扰动切换,比较容易克服积分饱和,得到广泛的应用,其表达式如下:

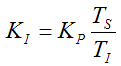
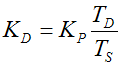
公式中:△Pn为第n次控制器输出对前次控制器输出的增量;en为第n次采样的偏差;KI为积分系数,TS为采样周期;KD为微分系数
由于数字PID控制比模拟控制更容易实现各种算法,所以为了改善控制质量,在实际应用中对PID算式进行了改进,如不完全微分型算式、微分先行PID控制算式、积分分离的PID算式等,都获得了很好的控制效果。