电动机作为传动机械装置,输出直接用于驱动负载。在电动机传动系统运转过程中,由于齿槽力矩、电磁效应和加工装配工艺等产生的转矩波动将直接作用到负载上,从而对系统速度平稳性及控制精度产生影响。尤其在轻载和低转速状态下,转矩波动值占电机输出力矩比例明显增大,这种影响更加不能忽略,因而准确测量转矩波动是电动机实际应用研究中亟待解决的问题。
1.间接测试方法
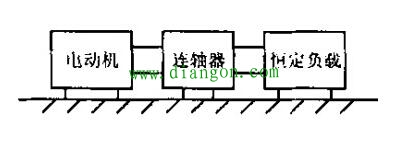
图1:电机工作状况平台示意图
按照动力学原理,角位移的微分是角速度,角速度的微分是角加速度,转动惯量一定时,角加速度与转矩大小成正比。按照这一原理,对电动机运行时的波动现象进行分析(参见图示1),电动机通过联轴器与一恒定负载相连组成工作系统。转矩出现波动时,其运动平衡方程如下式1示:
 ……1
……1
式中:
Te——为电动机电磁转矩;
T1——为恒定负载转矩;
J1——为电动机转动惯量;
J2——为恒定负载转动惯量;
θ——为电动机旋转时的角位移。
式1表示,工作系统中电动机转矩Te与恒定负载转矩T1之差和角加速度
成正比。只要测量出系统的角加速度,就可以测出电动机转矩波动值。测量角速度的问题则可以转换成测量系统角位移的问题。也就是说,只要测量出系统在旋转时的角位移就可以通过计算求出电动机转矩波动值,进而计算出转矩波动系数。由式1得: ……2
……2
由式1及式3可得:
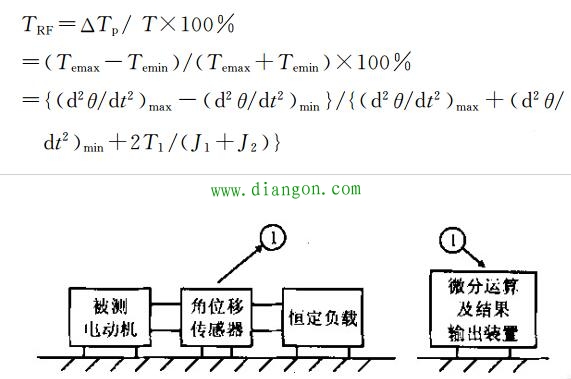
图2:间接法转矩波动测试示意图
转矩波动测试如图上2所示。将被测电动机与角位移传感器以及恒定负载同轴连接,角位移传感器输出接微分运算及结果输出装置。角位移传感器可使用旋转变压器发送机,使用旋转变压器发送机时,其输出信号要通过R/D转换器。接入微分运算及结果输出装置。微分运算及结果输出装置主要靠编程实现。恒定负载装置可使用磁粉制动器。检测时,使被测电动机在规定转速下旋转,并保持其电流恒定。可以给被测电动机施加恒定转矩,也可空载。空载情况比负载情况编程简单,理论上通过编程补偿可得到相同的测量结果。
2.直接测试方法
转矩波动系数的测量可以按照定义通过直接检测转矩变化量然后通过计算的方法得出。根据国标《GB/T30549-2014交流伺服电机通用技术条件》介绍,主要采用以下测试方式获取转矩波动系数:
在稳定工作温度下,电机施加额定转矩,并在产品专用技术条件规定的最低转速下运行,用转矩测试仪测量并记录电机在一转中的输出转矩,找出最大转矩和最小转矩,按照下式3算电机的转矩波动系数。 ……3
……3
式中:
KTb——转矩波动系数,%;
Tmax——最大转矩,单位为牛顿米(N.m);
Tmin——最小转矩,单位为牛顿米(N.m)。
这种方法清晰、直观,但是负载设备动态运行状态下容易引入误差。在此基础上现在测试方式以改进的堵转测试法为最优:用磁粉制动器作为负载,测量电机在额定电流时,转子在360/(2p)(p为电机极对数)范围内均分10点上的堵转转矩,分别找出堵转转矩最大值和最小值,即可利用公式1计算出转矩波动。
堵转测试时,在电机和负载之间接入动态扭矩转速传感器,随着技术发展,新型的扭矩转速传感器满足高精度、快响应的测量需求,可以很好的完成转矩波动测试。