1 引 言
步进电动机采用微步驱动技术,除了提高电动机的分辨率以外,很重要的目的是为了提高其转动的均匀性。常规的步进电动机系统在低速运行时,有明显的步进感。把一整步分成很多小步,转动的均匀性自然要提高,但是,微步驱动的步进电动机系统其角速度稳定度有何特点,与细分数有什么关系,角速度稳定度能达到什么水平,还受哪些因素的影响和限制等一系列问题,有必要搞清楚。以利于应用系统的设计者正确采用步进电动机的微步驱动技术,同时也是设计制造者所需要了解和掌握的。
为清楚起见,并且能有量的概念,文中给出一个微步驱动系统的实例。
2频域划分及角速度波动的特点
步进电动机的平均转速与控制脉冲频率(f
cp)成正比,与逻辑通电状态数(M)及转子齿数(Z
r)成反比,即
平均转速:

或平均角速度:

式中m——整步方式的逻辑通电状态数,
通常等于相数
n1——整步包含的微步数,即细分数
步进电动机运行时,根据其运动形式的特点,可将整个频域分成若干频段。典型的划分是将整个频域分为极低频、低频和高频。
2.1极低频

即控制脉冲的周期或间隔时间大于停止时间(ts)的频域。电动机每走一步都是单步响应过程,电动机按其自然频率振荡可衰减到静止。按式(2),电动机的平均角速度很小,但是在自由振荡过程中最大角速度可以达到相当大的值。实际上自由振荡过程中若不计衰减其最大角速度的值为:

可见,在该频域内电动机的角速度波动很大,在其正的最大值和负的最大值之间变化。
2.2低频

在这个频段内,控制脉冲的间隔时间比停止时间小,单步的角速度振荡不能衰减到零。但是控制脉冲的间隔时间比自由振荡周期的要长,所以一般有过冲或超调。在这个频段内起动电动机时,第二步的初始条件比较复杂,在不利的情况下可能产生明显的振荡,包括
f
cp=f
0 (6)
这是通常所说的低频共振点。
2.3高频

在这个频段内,控制脉冲的周期小于自由振荡周期的1/4,所以在这一频段内电动机起动时,第一步的角位移肯定不会超过一个步距角,即产生滞后的动态误差。电动机连续稳态运行时,也就不会有步进感觉。于是把
f
cp=f
0 (8)
作为步进电动机进入高频运行频域的分界线。也就是步进电动机进入比较连续平稳运行域的分界线。由该频率决定的电动机的平均角速度为:

以一台典型的四相混合式步进电动机为
例,它的相数,m=4,转子齿数z
r=50,如自然频率f
0=100Hz,在通常整步方式下运行,代入式(9)得:
就是说,这种典型的步进电动机系统,只有在转速高于120r/min时才进入连续平稳运行区。为了让这台电动机在第100r/min或更低的转速平稳运行,需采用微步驱动技术,细分数愈大,按式(9)进入连续平稳运行的平均速度愈低。若上述电动机取细分数n1=1024,则:

即转速降到8.5min转lr仍属连续平稳运行域。另外,即使在极低频不连续运行域,角速度的波动也随着细分数的增大而显著减小,这时角速度波动的极限值由式(4)表示,它与步距角成正比,或者说与细分数成反比。
3实验研究
实验装置是一套角速度测试系统,其框图如图1所示。
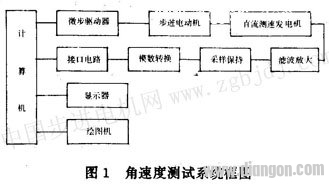
被试电动机是由哈杭电伺服技术研究所研制,用于微步驱动系统,该电机为68BYG2102型二相混合式步进电动机。基本技术数据为,转子齿数Zr=102,相绕组电阻R=50Ω,静态相电流I=0.3A,保持转矩T
k≥0.6Nm。所配驱动器也是哈杭所研制的二相电动机微步驱动器,细分数可变,nl=1,2,4,……,526,1024。
图2表示一组角速度波形的测试结果,测试时保持电动机的平均角速度不变,为250ms走n1微步,就是说0.25s走一整步或1/4齿距,平均角速度的值为:

图2a为极低频情况下角速度波形的示例。图中可以看出,角速度自由振荡的周期大
约为,T
0=5ms,所以其自然频率为:
曲线表明自由振荡的停止时间大约为
Ts=40ms。图la对应的是nl=4,f
cp=4nl=16.
属于极柢频域。曲线上可以看出角速度最大值达:

=56 rad/s(电角度)=0·549 rad/s约为平均角速度的9倍。
图2b对应于,nl=32,f
cp=128脉冲/s,
属于低频频域。角速度不会衰减到静止,但仍有较明显的振荡特征。
图2c和图2d分别对应于,nl=256,f
cp=1 024脉冲/s和nl=1 024,f
cp=4 096脉冲/s,都属于高频频域。电动机进入连续平稳运行域,角速度波形中没有自由振荡波动的影响。应指出的是,图中曲线显示的小的波动是测试系统不完善造成的,它具有明显的工频干扰的特征。不计这些工频干扰讯号,可看出角速度也有一些波动,在一整步范围内大约变化一个周期,即对于一个齿距的变化周期呈4次谐波的特征。这时角速度波动的绝对值甚小,在所示的例子中:

≈7.5 rad/s(电角度)一O.073 5rad/s

≈5.5 rad/s(电角度)=0.053 9rad/s
比较图2c和图2d的曲线,几乎完全相同。可见,对于某一平均角速度,一旦提高细分数,使cp脉冲提高到高频频域,电动机的角速度便趋于平稳。再进一步提高细分数时,角速度的波动不会进一步减小,即过分提高细分数对提高角速度稳定度没有什么帮助。
从以上的结果可以得到一点推论,对于角速度较高的运行域,采取整步方式已处在高频频域的场合,采用微步驱动对提高角速度稳定度不会有什么效果。
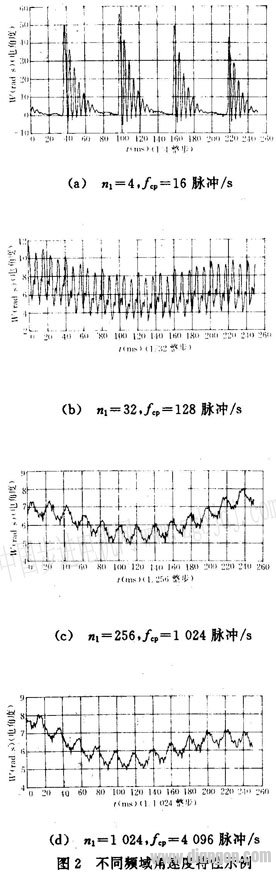
图3的实验曲线可表明这个结论。图3b对应于n1=l 024,比图3a细分数大得多,从振动特性看出,低速时,例如f<40k脉冲/s范围内,角速度波动的峰峰值(

)显著减小。而在较高转速范围内,角速度波动的值几乎没有变化。采取微步驱动技术可显著提高步进电动机低速运行的平稳性。
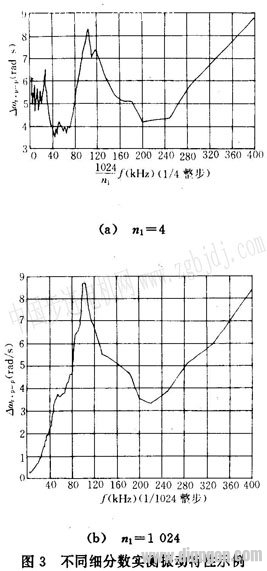
图2c或b表明,微步驱动电动机角速度呈4次谐波的特征,即在一个齿距范围交变4个周期。然而在一个齿距范围内走的步数很多,例如n
1=l 024时一个齿距要走4 096步。可见,对于走步脉冲而言,角速度的波动缓变。在一步范围内可认为角速度不变,即可近似地看成一种准稳态运行,可写成:

上式表明,在f
cp恒定时,角速度的波动是由步距角的变动,即步距角误差引起的。反之,角速度的波动反映了步距角的变化。
以图4所示实测的角速度曲线为例。从图中可得角速度的最大值约为

=0.20rad/s,最小值约为

=O.13 rad/s。相应地可得步距角的最大值和最小值为:
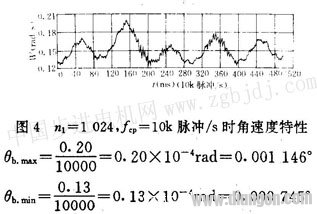
步距角的平均值:

=0.15×10
-4=0.000 862
o
所以微步距角误差为:

=+O.000 278
o和-0.000 117
o
这和微步距角测试所得结果基本一致。
4结论
a.微步驱动能显著提高步进电动机低速运行区角速度的平稳性。对高速运行域角速度的稳定性没有明显的影响。
b.微步驱动系统低速运转的均匀性主要由微步距角的均匀性决定,对于四相(二相)电动机,减小4次谐波转矩的影响很重要。
c.给出了用角速度变化曲线确定微步距角变化规律和微步距角误差的新方法。
提醒:《微步驱动步进电动机的角速度均匀性》最后刷新时间 2023-07-10 04:11:04,本站为公益型个人网站,仅供个人学习和记录信息,不进行任何商业性质的盈利。如果内容、图片资源失效或内容涉及侵权,请反馈至,我们会及时处理。本站只保证内容的可读性,无法保证真实性,《微步驱动步进电动机的角速度均匀性》该内容的真实性请自行鉴别。