到目前为止(STEP 7-Micro/WIN V4.0 SP5),使用 PID 向导生成的子程序时,由于用户程序不能直接使用 PID 指令,它的无扰切换能力因为隔了外壳子程序,所以受到了局限。如果对无扰切换要求比较严格,需要另外编一些程序加以处理。
考察如下 PID 控制子程序。
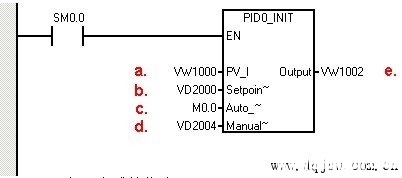 图 1. PID 向导生成的指令 图中:
图 1. PID 向导生成的指令 图中:a.过程反馈量
b.设定值,实数
c.自动/手动控制,“1”=自动,“0”=手动
d.手动控制输出值,0.0 - 1.0 之间的一个实数
e.PID 控制输出值
要实现无扰动切换,必须:
.在从自动向手动切换时,使手动输出值(VD2004)等于当前的实际控制输出值;
.在从手动向自动切换使,使设定值相当于当前的过程反馈值。
为此,可编写类似下图所示的程序,放在 PID 控制子程序之前:
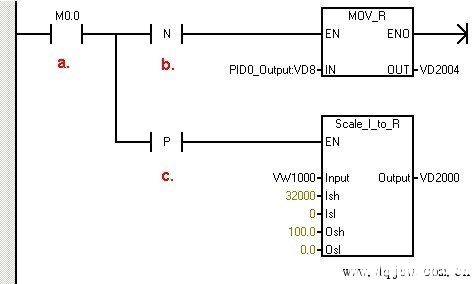 图 2. 无扰切换处理程序 图中:
图 2. 无扰切换处理程序 图中:a.自动/手动切换控制点
b.从自动向手动切换时,使手动输出值等于实际当前值
c.从手动向自动切换时,把当前反馈量换算为相应的给定值
上述程序中的 Scale_I_to_R 就是量程变换指令库中的子程序。这是为了解决过程反馈与设定值之间的换算问题。用户也可以自己编程换算,或者根据反馈与给定的取值范围决定是否需要换算。
此段程序适用于 STEP 7-Micro/WIN V4.0 SP5 及以前版本,仅供参考,如果在实际项目中使用,上述程序未必一定适用。用户需要根据实际工艺决定自己的编程思路。