步进电机的单步运行状态是指步进电机在一相或多相控制绕组通电状态下仅改变一次通电状态时的运行方式。
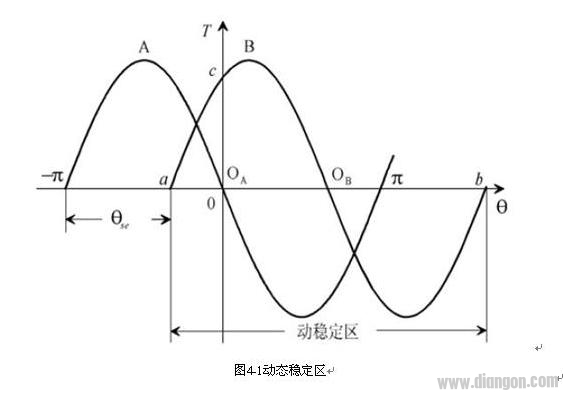
动稳定区
当A 相控制绕组通电时,矩角特性如图4-1中的曲线A 所示若步进电机为理想空载,则
转子处于稳定平衡点OA 处如果将A 相通电改变为B 相通电,那么矩角特性应向前移动一个步距角 变为曲线B,OB 点为新的稳定平衡点由于在改变通电状态的初瞬转子位置来不及改变还处于θ=0的位置,对应的电磁转矩却由O 突变为 (曲线B上的C 点).
在该转矩的作用下,转子向新的稳定平衡位置移动,直至到达OB 点为止.对应它的静稳定区为 < < 即改变通电状态的瞬间,只要转子在这个区域内,就能趋向新的稳定平衡位置因此,把后一个通电相的静稳定区称为前一个通电相的动稳定区把初始稳定平衡点OA 与动稳定区的边界点a 之间的距离称为稳定裕度拍数越多,步距角越小,动稳定区就越接近静稳定区,稳定裕度越大,运行的稳定性越好,转子从原来的稳定平衡点到达新的稳定平衡点的时间越短,能够响应的频率也就越高。