随着电力电子技术以及控制技术的发展,交流变频调速在工业电机拖动领域得到了广泛应用;可编程控制器plc作为替代继电器的新型控制装置,简单可靠,操作方便、通用灵活、体积小、使用寿命长且功能强大、容易使用、可靠性高,常常被用于现场数据采集和设备的控制;在此,本次设计就是基于S7-200PLC的USS通信方式的速度闭环定位控制。
将现在应用最广泛的PLC和变频器综合起来通过USS协议网络控制实现速度闭环定位控制。PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后停止运行并锁定。因此,该系统必须具备以下三个主体部分:控制运算部分、执行和反馈部分。控制运算主要由PLC和变频器来完成;执行元件为变频器和电机;反馈部分主要为速度反馈。
S7-200 PLC通过USS协议网络控制Micro-Master MM420变频器,控制电动机的启动、制动停和定位控制,并能够通过PLC读取变频器参数、设置变频器参数。
1.系统设计的总体思路
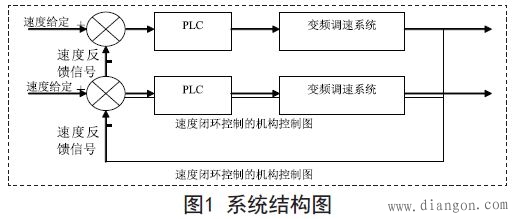
系统主要由三个部分构成,即可编程逻辑控制器件PLC、变频器和电机。首先通过设置给定输入给PLC,再通过PLC控制变频器,再经由变频器来控制电机,随后将电机的转速反馈给PLC,经比较后输出给变频器从而实现无静差调速。构成闭环系统就要把速度信息反馈给输入。速度的测量可以通过光电编码器和PLC来实现。
速度采集:S7-200具有高速脉冲采集功能,采集频率可以达到30KHz,共有6个高速计数器(HSC0~HSC5)工作模式有12种。在固定时间间隔内采集脉冲差值,通过计算既可以获得电动机的当前转速。
例如:设采样周期为100ms即是每隔100ms采集脉冲一次,光电开关每转发出8个脉冲,那么就可以得到速度为:

其中Δm为采样周期内接受到的脉冲数。
转速n的单位为r /min.
闭环控制就是将速度信号反馈给PLC,再通过与给定量比较,输出给PID控制部分,从而调节速度使其能达到设定要求。具体如图1所示。
2.系统硬件接线与变频器的参数设置
西门子S7-200和MicroMaster变频器之间采用通讯协议USS,用户可通过程序调用的方式实现通信,编程的工作量小,是一种费用低使用方便的通讯方式。S7-200 CPU的通信端口的规格是RS 485,因此将S7-200的通信端口与驱动装置的RS485端口连接,在RS485网络上实现USS通信无疑是最方便经济的。
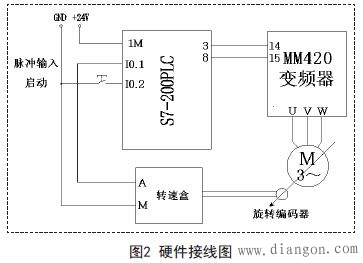
系统硬件接线图如图2所示,将MM440的通信端子为P+(29)和N-(30)分别接至S7-200通信口的3号与8号针,以建立S7-200与MM420变频器的USS通信硬件连接。其中,I0.1为脉冲输入,I0.2为启动开关。
总线连成后,除在上位机进行编程外,还要在变频器上进行各参数设置,主要如表1:

3.软件设计
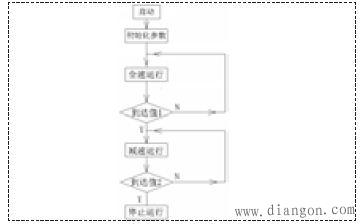
应用S7-200PLC和变频器通过USS协议网络控制实现速度闭环定位控制。要求PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后停止运行并锁定。系统软件程序流程图设计如图3所示。
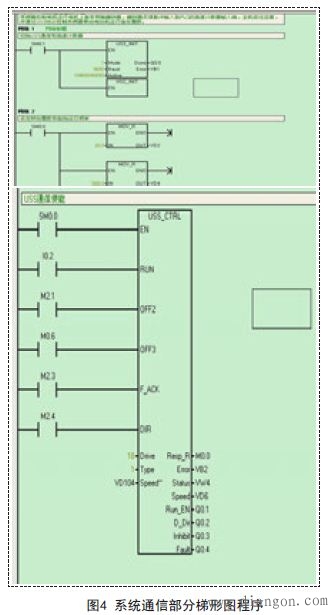
USS协议对硬件设备要求低,减少了设备之间布线的数量。无需重新布线就可以改变控制功能。可通过串行接口设置来修改变频器的参数。可连续对变频器的特性进行监测和控制。利用S7-200 CPU组成USS通信的控制网络具有较高的性价比。西门子S7-200和MicroMaster变频器之间采用通讯协议USS,用户可通过程序调用的方式实现通信,编程的工作量小,是一种费用低使用方便的通讯方式。本系统USS协议通信部分程序梯形图如图4所示。
4.结语
本项目运行效果:PLC根据输入端的控制信号及脉冲信号,经过程序运算后由通讯端口控制变频器运行设定的行程;电机运行到减速值后开始减速;电机运行到设定值后停止运行并锁定,实现了速度的闭环定位自动控制。
实践证明:西门子变频器与PLC通过USS协议进行串行通讯,无须购置附件进行系统组态,直接对其组网监控,进行电机闭环调速,是一种低成本、高性能的好途径,这种设计方法具有较大的推广意义。