从PCS7 V7.1开始,可以优化“PCS 7 Library”和“PCS 7 Advanced Process Library”中的控制器,以及有类似功能的控制器。同样也可以调整步进控制器的马达启动时间。
要求:
- PCS 7的PID整定器软件安装在工程师站上。在正常PCS 7工程师站安装中就会自动安装此工具。
- 安装相应授权。从PCS 7 V7.1开始,不再需要额外的PCS 7 PID整定器授权。
- CFC已经编译并下载到plc中。
- ES和PLC之间有在线连接。
- 对于控制回路需要了解以下几方面:
- 控制对象的过程特性(是否存在积分环节)
- 控制回路状态(手动或者自动)
- 控制器的阶跃工作点
- 控制器类型(比例积分微分,比例积分或者比例控制器)
说明:
以下以连续型的比例积分控制器为例解释如何使用PCS 7的PID整定器。
更多信息可以参考对应的readme文件和PCS 7的PID 整定器的在线帮助文件。在文档“PID Control with Gain Scheduling and PID Tuning”中,给出了一个基于PCS 7 APL(高级过程功能库)模块的实际操作例子。
注意:
- 请注意优化过程会干扰实际系统运行。如果影响了实际过程运行,在相应优化步骤中会有提示。用户需要知道可能出现的后果。
- 在优化工作之前,对操作工做合适的人员安排。
- 优化过程中,密切关注过程曲线记录。
| 序号 | 步骤 |
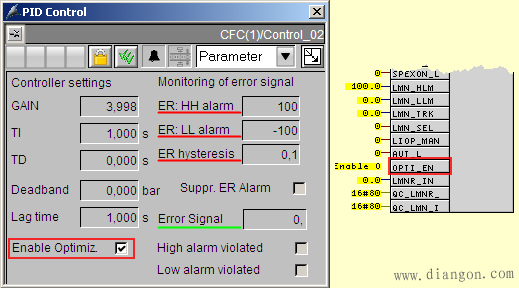
| 1 | 为控制器优化做准备 优化之前,控制器需要切换到“优化”模式。可以在CFC中或者在上位机OS面板上设置。 在CFC中将“OPTI_EN”管脚设为“Enable”,这个管脚默认隐藏。如果在OS面板上,在“Parameter”视图中勾选“Enable Optimiz”选项。
|
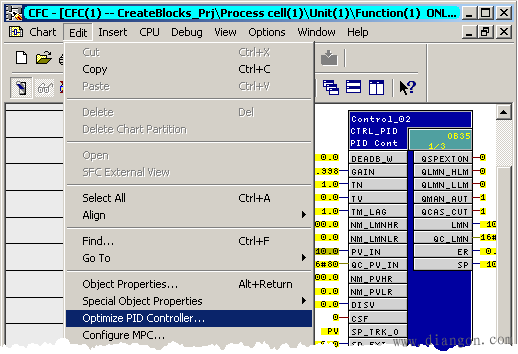
| 2 | 启动PCS 7的PID整定器 选择控制器功能块,在CFC中通过菜单“Edit > Optimize PID Controller...”启动此工具。
|
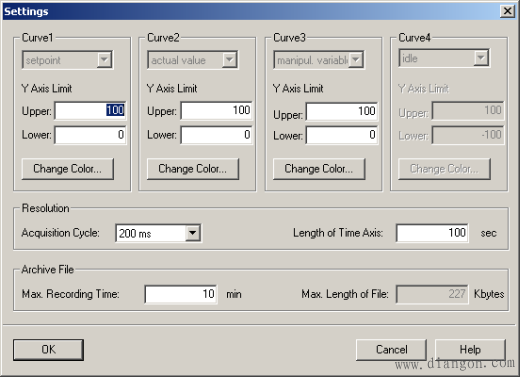
| 3 | 设置曲线记录参数 为了使当前显示符合实际,停止曲线记录并点击“Settings...”按钮。
|
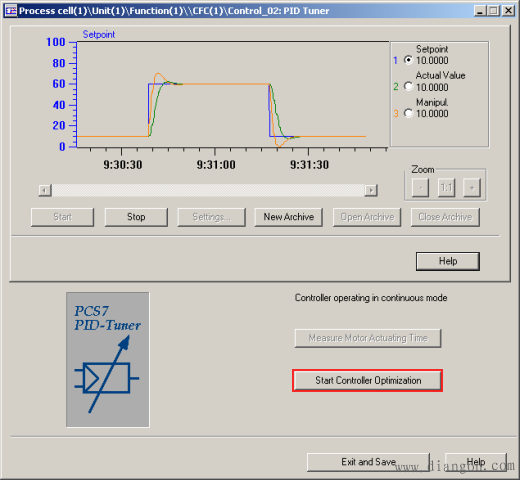
| 4 | 启动控制器优化 点击"Start Controller Optimization" 按钮。
|
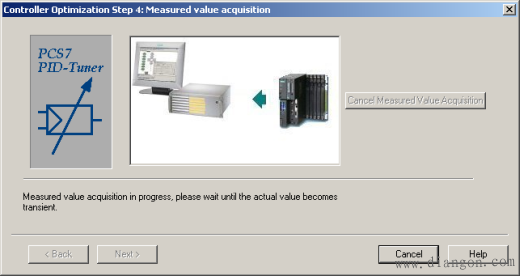
| 5 | 读取测量值 (步骤 1 到 5) 步骤1到3中,需要定义读取测量值的条件。步骤4中读取测量值,监视曲线记录。这时可以取消过程仿真。
|
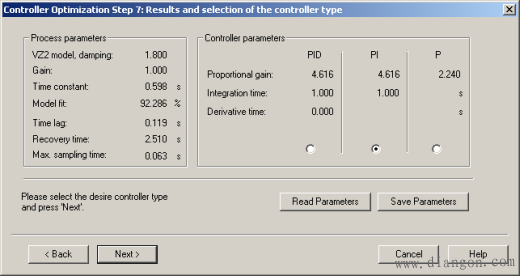
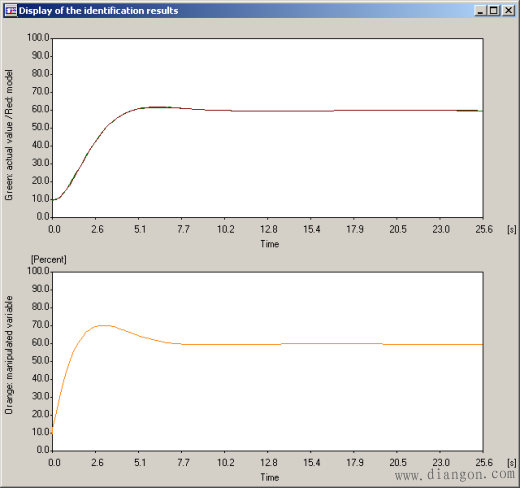
| 6 | 控制器的行为及结果(步骤 6 到 8) 在步骤6和7中选择控制器行为和类型。步骤8中使用优化控制器参数仿真控制回路。可以通过不同阶跃值和控制器参数来测试。
|
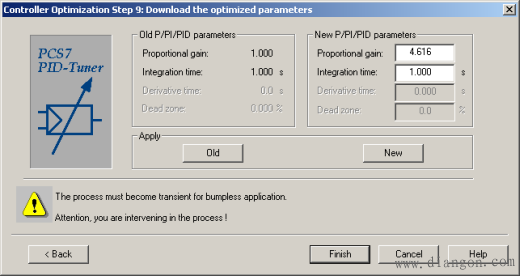
| 7 | 设置控制器 (步骤9) 最后一步,决定是否采用老的还是新的设置。点击“Finish”按钮结束参数优化。
|
| 8 | 关闭PID整定器 控制器已经采用新的参数设置。通过“End and save”按钮关闭PID整定器。控制器被复位到初始的操作状态。 |
创建环境:
此篇FAQ中的画面创建于SIMATIC PCS 7 V7.1。