制动形态:
1、位能性负载一般处于制动状态是使其保持一定的运行速度。
2、机械负载制动时一般是停车。
制动方法:
1、能耗制动
方法:切断电源,接入直流电,在定子回路中串入电阻。
原理:转子切割直流稳恒磁场产生电流,电流守稳恒磁场的作用产生制动转矩,即将转子的动能转变为电能,消耗在转子电阻上。
优点:制动力虽转速降低而减小,制动过程比较平稳。
缺点:需专门直流电源。
注意:制动结束后要切断直流电源,以免定子绕组发热。
2.反接制动
1)电源反接制动
方法:改变电动机定子绕组与电源联接相序。
原理:电源反接,磁场反向,转子电流、T均反向。与n相反。
注意点:
a、为了限制制动电流和增大初始制动转矩,在转子回路串入制动电阻。
b、当转速接近为0时,需立即切断电源,让电机停车,否则反转。
利用制动特性曲线说明制动过程。
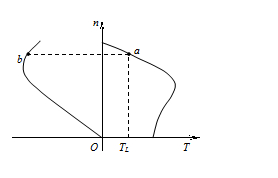
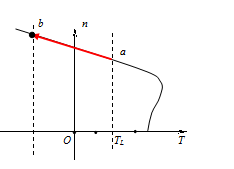
2)倒拉反接制动
方法:当绕线式异步电动机拖动位能性负载时,在其转子回路中串入很大的电阻。
场合:低速下放重物。
曲线:
过程:n = 0,电磁转矩小于负载转矩,在位能负载的作用下,电动机反转,工作点从a点下移。此时因n<0,电机进入制动状态,直至电磁转矩等于负载转矩,电机才稳定运行于b点。因这一制动过程是由于重物倒拉引起的,所以称为倒拉反接制动(或称倒拉反接运行),其转差率
与电源反接制动一样,转差率s都大于1。
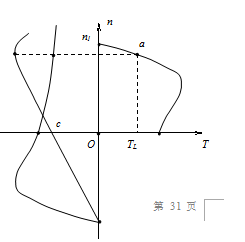
问题1: 一台YR系列绕线式异步电动机PN=20kW,nN=720r/min,E2N=197V,I2N=74.5A,λ=3。负载为额定值,即TL=TN。求:
(1)电动机欲以的速度下放重物,转子每相应串入多大的电阻?
(2)当转子串入电阻为R=39r2,电动机转速多大?运行在什么状态?
解:(1)通过例5-5知,r2=0.061Ω。
起重机下放重物,则n=-300r/min<0,T=TL>0,所以工作点位于第IV象限,如图c点。
当TL = TN时,sN = 0.04
转子应串电阻
(2)R=39r2,此时的转差率为
电动机转速
工作点在第IV象限,电动机运行于倒拉反接制动状态(下放重物)。
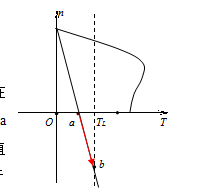
3.回馈制动
方法:电动机在外力(如起重机机高速下放重物)作用下,使其电动机的转速超过旋转磁场的同步速,即n>n1,s<0,转子中感应电势、电流和转矩的方向都发生了变化,电磁转矩方向与转子转向相反,成为制动转矩。此时电动机将机械能转变为电能馈送电网,所以称回馈制动,如图所示。这种制动状态在实际应用较少,。故不作深入研究。
过程:在位能性转矩的作用下,电动机的转速大于同步转速时,
注:转子回路不宜串电阻。否则电机下放重物的速度太快。
优点:简单,能量回馈电网。
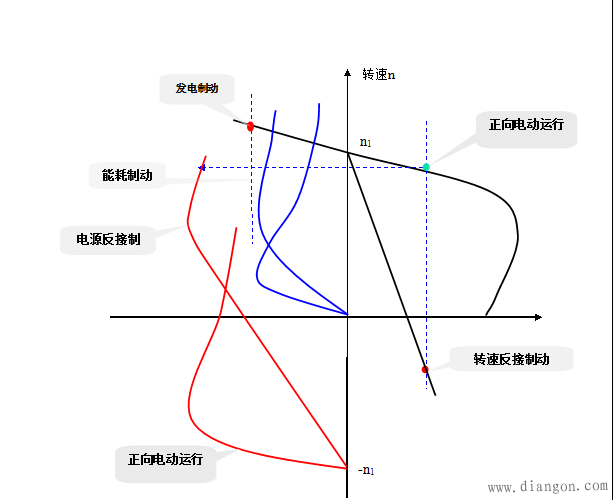
5、异步电动机运行状态小结
1.机械特性
起动、调速、反向、制动在特性曲线上的描述如图所示
2.各种运行状态时的转差率s的数值范围
电动运行状态:0< s <1
反接制动状态:s > 1
回馈制动状态:s < 0