一、问题的提出
十字路口车辆穿梳,行人熙攘,车行车道,人行人道,有条不紊。那么靠什么来实现这井然秩序呢?靠的是交通信号灯的自动指挥系统。交通信号灯控制方式很多,本子模块介绍利用步进梯形指令单流程编程实现的控制系统。
交通灯的控制要求如下:
(一)、控制开关
信号灯受启动及停止按钮的控制,当按动启动按钮时,信号灯系统开始工作,并周而复始地循环工作,当按动停止按钮时,系统将停止在初始壮态,即南北红灯亮,禁止通行;东西绿灯亮,允许通行。
(二)、控制要求
1 、北红灯亮维持 30 秒,在南北红灯亮的同时,东西绿灯也亮,并维持 25 秒,到 25 秒时,东西方向绿灯闪,闪亮 3 秒后,绿灯灭。在东西绿灯熄灭的同时,东西黄灯亮,并维持 2 秒,到 2 秒时,东西黄灯灭,东西红灯亮。同时,南北红灯熄灭,南北绿灯亮。
2 、西红灯亮维持 30 秒。南北绿灯亮维持 25 秒,然后闪亮 3 秒,再熄灭。同时南北方向黄灯亮,并维持 2 秒后熄灭,这时南北红灯亮,东西绿灯亮。
接下去周而复始,直到停止按钮被按下为止。
信号灯动作系统可用图 1 状态图表示。
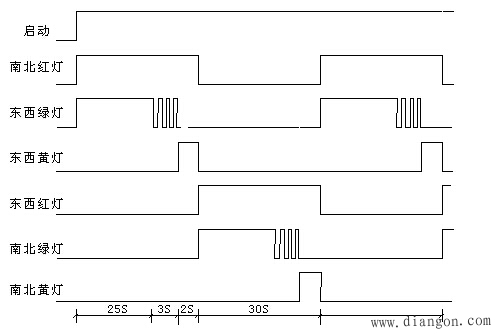
图 1 交通指挥信号灯状态图
二、硬件及接线
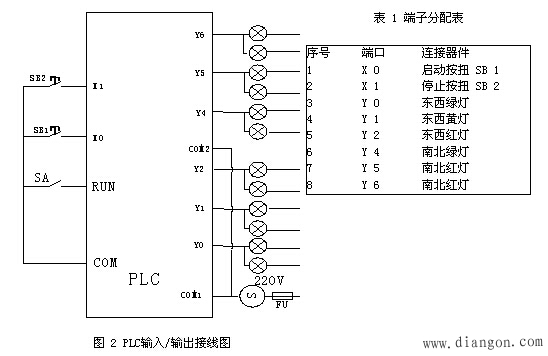
根据上述要求可见,系统所需红、绿、黄各 4 只信号灯,本案由两个信号灯箱实现;系统需要启动和停止两个按钮,由按钮箱实现。
可编程控制器的输入 / 输出端子分配及硬件连接分别由表 1 及图 2 所示。其中 SA 开关代表可编程控制器自身的运行开关。
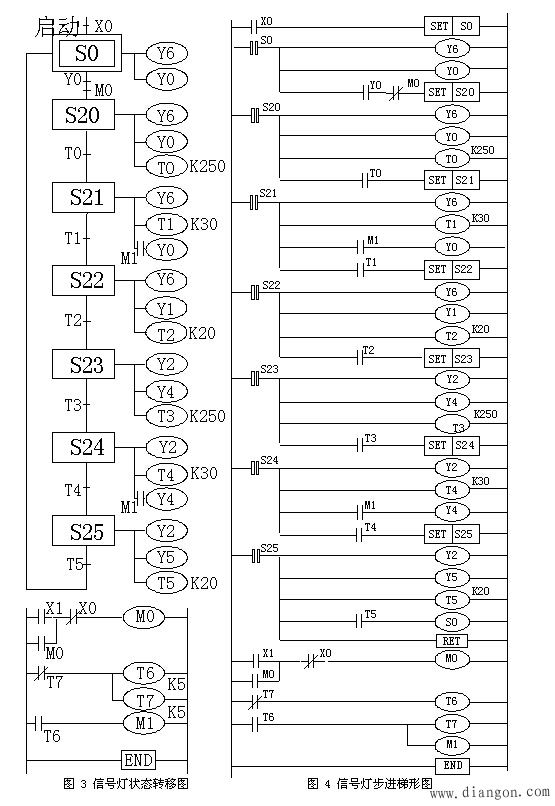
在本子模块中,我们采用步进梯形指令单流程编程实现,其状态转移图如图 3所示。由图可知,我们把东西和南北方向信号灯的动作视为一个顺序动作,每一个时序同时有两个输出,一个输出控制东西方向的信号灯,另一个输出控制南北方向的信号灯。
三、交通信号灯的软件设计
状态转移图对应的步进梯形图如图 4所示,现简单分析一下工作原理。当启动按钮SB1按下时,X0接通,S0置1,系统进入S0状态,驱动Y6、Y0,使南北红灯及东西绿灯同时亮,Y0接通,状态转移条件满足,系统将转移到S20状态,在S20状态下,Y6、Y0仍被驱动,即南北方向的红灯及东西方向的绿灯继续亮,同时驱动定时器T0,定时器的设定时间为25秒,25秒后,状态转移到S21,在S21状态下,Y6继续保持,但Y0受控于M1,而M1是由两个定时器T6和T7控制,T6、T7组成一个1秒的震荡器,即东西方向的绿灯闪亮。在本状态下,同时也驱动定时器T1,定时时间为3秒,3秒时间到,状态转移到S22,在S22状态下,Y6仍然被驱动,南北方向红灯继续亮,同时驱动T2、Y1,东西方向的绿灯灭,Y1口驱动的是东西方向的黄灯,故东西方向的黄灯亮,绿灯停。T2的定时时间为2秒,2秒时间到,状态转移到S23,在S23状态下,同时驱动Y2、Y4及T3,东西方向的红蛋亮,南北方向的绿灯亮,T3的定时时间为25秒,25秒时间到,状态转移到S24。在S24状态下,驱动Y2、T4,东西方向的红灯继续亮,而南北方向的绿灯驱动口Y4受控于M1,M1是震荡周期为1秒的震荡器,故南北方向的绿灯闪亮。T4的定时时间是3秒,3秒后,状态转移到S25。在S25状态下,同时驱动Y2、Y5及T5,即东西方向的红灯、南北的黄灯亮,T5定时器的定时时间为2秒,2秒时间到,定时器的定时时间到,T5的触点接通,状态又重新转移到S0。即南北方向的红灯、东西方向的绿灯亮,系统将重复上述的动作顺序,周而复始的继续工作。当停止按钮SB2被按下时,软继电器M0接通,其常闭触点M0断开,系统执行一周后,将停留在S0状态,及保持南北方向的红灯、东西方向的绿灯亮。
(一)、 FX 2 的状态元件三、知识点的扩展
状态元件是构成状态转移图的基本元素,是可编程控制器的软元件之一。 FX 2 共有 1000个状态元件,其分类、编号、数量及用途如表1所示。
表1 FX 2 的状态元件
类别 | 元件编号 | 个数 | 用途及特点 |
初始状态 | S0~S9 | 10 | 用作 SFC的初始状态 |
返回状态 | S10~S19 | 10 | 多运行模式控制当中,用作返回原点的状态 |
一般状态 | S20~S499 | 480 | 用作 SFC的中间状态 |
掉电保持状态 | S500~S899 | 400 | 具有停电保持功能,停电恢复后需继续执行的场合,可用这些状态元件 |
信号报警状态 | S900~S999 | 100 | 用作报警元件使用 |
注: 1状态的编号必须在指定范围选择。
2各状态元件的触点,在plc内部可自由使用,次数不限。
3在不用步进顺控指令时,状态元件可作为辅助继电器在程序中使用。
4通过参数设置,可改变一般状态元件和掉电保持状态元件的地址分配。
(二)、 FX2系列PLC的步进顺控指令
FX 2 系列 PLC的步进指令有两条:步进接点指令STL和步进返回指令RET。
1、STL:步进接点指令 梯形图符号为 ![]()
STL指令的意义为激活某个状态。在梯形图上体现为从母线上引出的状态接点。STL指令有建立子母线的功能,以使该状态的所有操作均在子母线上进行。步进接点指令在梯形图中的情况见图5所示。
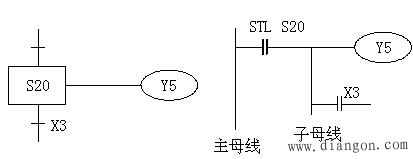
图 5步进接点指令STL的符号及含义
2、步进返回指令 梯形图为 ![]()
RET指令用于返回主母线。使步进顺控程序执行完毕时,非状态程序的操作在主母线上完成,防止出现逻辑错误。状态转移程序的结尾必须使用RET指令。
(三)、运用状态编程思想解决顺控问题的方法步骤
为了说明状态编程思想,我们先看一个实例:某自动台车在启动前位于导轨的中部,如图 6所示。某一个工作周期的控制工艺要求如下:
a 按下启动按钮SB,台车电机M正转,台车前进,碰到限位开关SQ1后,台车电机反转,台车后退。
b 台车后退碰到限位开关SQ2后,台车电机M停转,台车停车,停5s,第二次前进,碰到限位开关SQ3,再次后退。
c 当后退再次碰到限位开关SQ2时,台车停止。
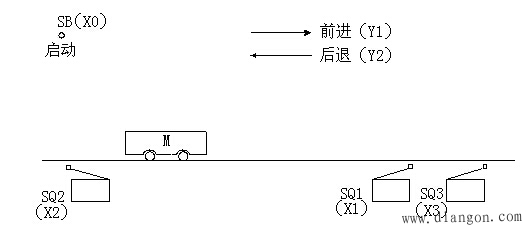
图 4-46自动台车示意图
为设计本控制系统的梯形图,先安排输入、输出口及机内器件。台车由电机 M驱动,正转(前进)由PLC的输出点Y1控制,反转(后退)由Y2控制。为了解决延时5s,选用定时器T0。将起动按钮SB及限位开关SQ1、SQ2、SQ3分别接于X0、X1、X2、X3。
下面我们以台车往返控制为例,说明运用状态编程思想设计状态转移图( SFC)的方法和步骤。
1、将整个过程按任务要求分解,其中的每个工序均对应一个状态,并分配状态元件如下。
| a 初始状态 S0 | d 延时5s S22 | |
| b 前进 S20 | e 再前进 S23 | |
| c 后退 S21 | f 再后退 S24 |
注意:虽然 S20与S23,S21与S24,功能相同,但它们是状态转移图中的不同工序,也就是不同状态,故编号也不同。
2、弄清每个状态的功能、作用。
S0 PLC上电作好工作准备
S20 前进(输出Y1,驱动电动机M正转)
S21 后退(输出Y2,驱动电动机M反转)
S22 延时5s(定时器T0,设定为5s,延时到T0动作)
S23 同S20
S24 同S21
各状态的功能是通过 PLC驱动其各种负载来完成的。负载可由状态元件直接驱动,也可由其他软元件触点的逻辑组合驱动,如图5-5。
 |  | |
| (a)直接驱动 | (b)软元件组合驱动 |
图 6 负载的驱动
3、找出每个状态的转移条件 。即在什么条件将下个状态“激活”。状态转移图就是状态和状态转移条件及转移方向构成的流程图,弄清转移条件当然是必要的。
经分析可知,本例中各状态的转移条件如下。
S20 转移条件 SB
S21 转移条件 SQ1
S22 转移条件 SQ2
S23 转移条件 T0
S24 转移条件 SQ3
状态的转移条件可以是单一的,也可以有多个元件的串、并联组合。如图 7所示。
 |  | |
| (a)单一条件 | (b)状态的转移条件 |
图 7 状态的转移条件
经过以上三步,可得到台车往返控制的顺序状态转移图如图 8所示。
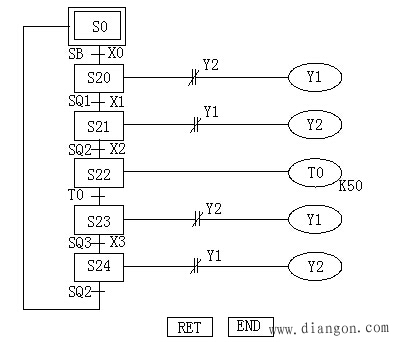
图 8 台车自动往返系统状态转移流程图