随着变频器的功率不断加大,从500KW,1000KW,2000KW电机所拖动的系统也越来越复杂,相互关联的设备和物料也越来越多,对速度的变化的扰动越来越敏感。同时,一个大型系统的运转由于工况的变化,系统检查,性能测量等原因,在电动机运行过程中,对变频器转速的控制系统在开环状态和闭环状态的转换。在每一次转换中,速度的剧烈变化都会使设备运行工况恶化,操作人员精神紧张,在经过多年变频器的调试应用中,对变频器转速给定系统用plc进行优化,达到进行开环,闭环工作状态,给定操作源转换的环境下,变频器转速输出无振荡,电机速度变化平滑,系统运行稳定。
从1999年到2005年,对变频器的速度给定的PLC程序进行不断的优级化,经过不同工作场合,形成了三种类型(直接切换,节点控制,速度扼制)的开环/闭环转换的典型系统结构。
一、PID运算
在本文中对高压变频器进行转速的开环和闭环控制,将各种控制信号和反馈信号输入PLC,完成速度控制的运算输出转速信号驱动变频的。应用德国西门子公司生产的S7-200系列的PLC产品。应用其内部配置的PID运算模块流程如下:
1.选择循环
配置哪一个PID循环?不同的PLC支持不同数目的PID循环。
2.设定循环参数
(1)PID指令V内存内的36字节参数表。您必须指定此表的地址,作为直接V内存字节地址。
(2)不建议为参数表地址创建符号名。PID向导生成的代码使用此参数表地址创建操作数,作为参数表内的相对偏移量。如果您为参数表地址创建符号名,然后改变为该符号指定的地址,由PID向导生成的代码将不能正确执行。
(3)指定正常化循环定点。对于循环定点,您可以输入双字地址或0.0至1.0之间的实数常量。
(4)循环增益、循环采样时间、循环积分时间、循环微分时间设定。
3.设定循环输入及输出选项
(1)设定输入和过程变量转化为标准值。
(2)输出值通过运算和取整转化为整数值。
4.设定循环警报选项
(1)位是否应设定低数值警报?如果是,可以为警报地址输入位地址或已经定义符号,并指定低警报限制值。
(2)位是否应设定高数值警报?如果是,可以为警报地址输入位地址或已经定义符号,并指定高警报限制值。
5.为计算指定内存区域
(1)PID计算需要内存空间,存储暂时结果。您需要指定此计算区域的起始V内存字节地址。
(2)可选:增加PID手动控制。
6.指定初始化子程序及中断程序
(1)PID运算前,应用子程序对回路表进行初始化。
(2)PID指令用于定时发生的中断程序中。
7.生成PID代码
8.PID算法

二、通用程序块
编程中,将经常用到的程序段进行标准化,减少出错率和提高工作效率。在价绍的程序中,PID运算都放在定时中断0中,将设定输入,运算进行,结果输出三个数值量转换和回路表地址的程序段集合成为通用的程序模块,在所有程序中都是一致的,保证设备程序的通用化和维护时标准化。
1.将设定变量输入进行标准化后对输入PID回路表
2.将设备运行的闭环反馈信号标准化输入PID回路表
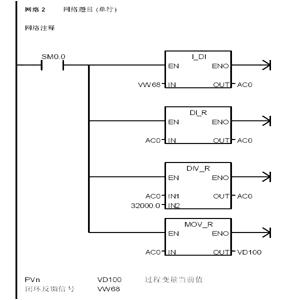
在回路表中,只应用标准实数进行运算,所有的外部参数都必须经过转换,成为标准实数后才能输入回路表。
3.将运算得出的标准化结果转换为整数变量
回路表输出的值是标准实数,将其转化为外部的数值标准。
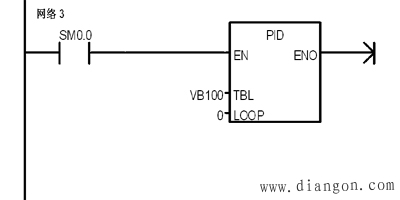
4.PID运算进行
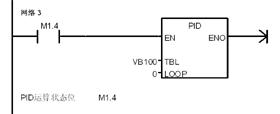
在此程序中,设定PID的运算的地址是100,自动生成回路表,使用100到136的地址用于回路表。
5.通用程序块的采用,是在对设备调试,运行中所产生的应用方法。程序进行系列化,标准化在工业应用中,是当其中一个程序段在理论上可行,并通过现场环境考验合格后,才可以列为一个通用程序块。在编程中,可以不必考虑程序内部的逻辑,中考虑程序的输入与输出映射,这样不但能节约大量的编程时间和调试时间,且当出现问题时,还能大大减轻对程序检查,判断时间。
三、直接切换
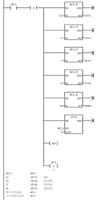
在高压变频的先期应用中,相对于设备的工作环境,操作要是,对于转速控制的方案是采用的是直接对开/闭环进行切换,其程序如下:
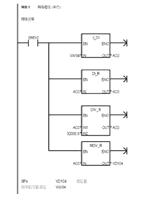
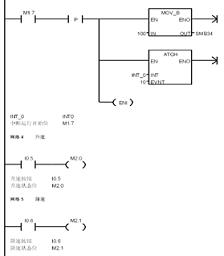
1.在开环运行状态中,接收到切入闭环工作的信号后,将PID运算的回路表进行初始化,写入采样时间,比例增益,积分时间,微分时间。
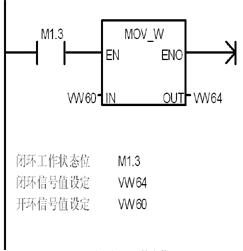
2.将输出的模拟由开环的给定转为闭环给定
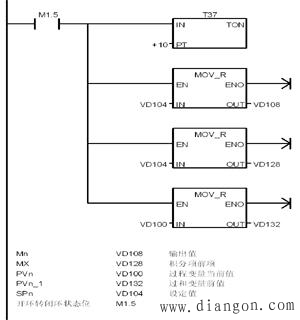
3.启用1秒时间用地开环运行状态转为闭环工作状态的缓冲,并将开环运行的速度参数用于闭环运行的初始参数:
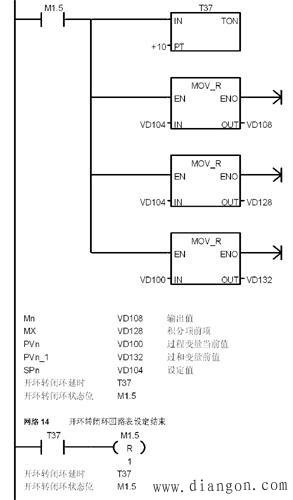
4.闭环初始化结束后运行PID运算,进行闭环运行状态:
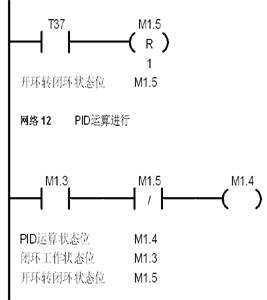
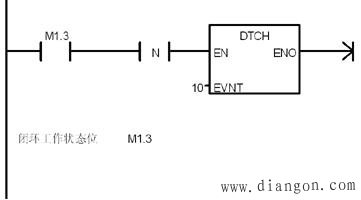
5.在闭环状态运行时,转换为开环状态运行,通过闭环运行状态位的变化中止中断:
6.实际应用
2000年,630KW变频器在豆坝电厂4号机组引风机上运行,总结性能如下:
(1)PLC程序简单,可靠。
(2)从开环向闭环转换稳定,电厂在机组启用时,采用开环运行对锅炉点火,发电后切到闭环保持运行稳定,满足机组运行要求。
(3)从闭环切到开环时,要将转速调到一个特定值,此时闭环输出和开环给定一致后方能切换,使操作人员工作量加大,且易出现切换时风机转速阶跃,风机输出风量有波动。
四、节点控制
在多台高压变频器的应用中,设备用户要求闭环运行状态向开环状态切换时的速度不变,操作简单,避免操作失误时出现速度大的阶跃,避免电机和设备运行中的冲击。在中期采用了节点控制的方案:
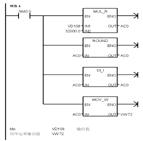
(1)速度调节由电位器改为按钮或开关控制,别为升速控制和降速控制,中断运行设定从闭环给定开通变为运行后即开通,不设置关闭:
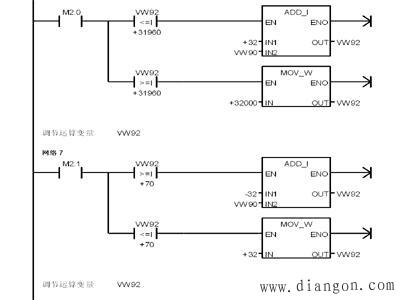
2.在中断程序中,加入累加运算的速度设定程序:
3.开环运行转为闭环运行时的程序和直接切换的程序段一致,从闭环转为开环运行时的程序段更改为:
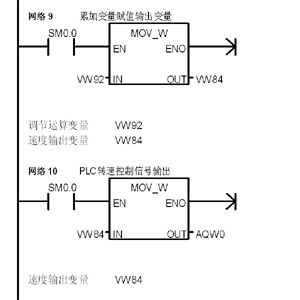
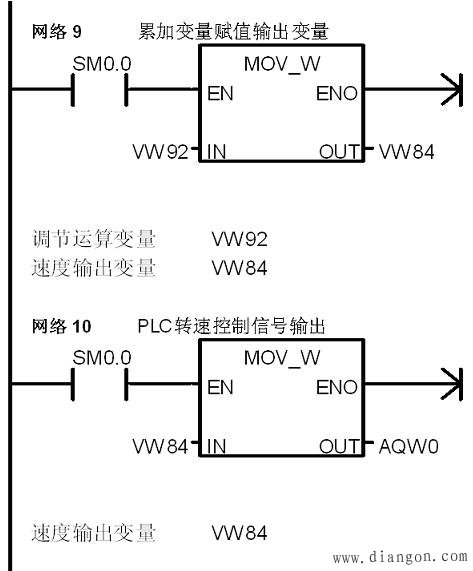
4.开环转速输出给定程序段:
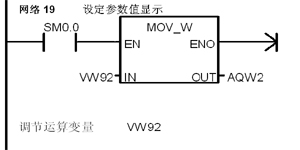
5.在运行中,为监视内部转速设定的参数值,将内部的累加设定参数送到一个模拟量输出:
6.实际应用
2003年,在云南天然气化工厂供水提升泵站应用,总结特点如下:
(1)开闭环间切换没有阶跃,转换平稳,实现开闭环切换时速度不变的性能。
(2)操作方便,简单,在状态转换中避免了操作失误引发的设备波动。
五、速度扼制
在节点控制的方案中,虽实现了开环状态工作与闭环状态工作的无阶跃切换,但是其控制方式是采用节点方式控制,与工业上通用的电位器控制和4-20mA电流控制不相匹配,限制了应用的范围,同时对内部参数量显示,占用了输出端口资源。在最新的方案中,采用速度扼制的原理来实现变频器开闭环工作的无阶跃转换。
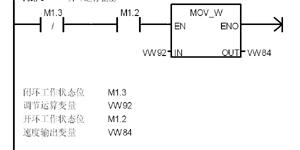
1.转速最终输出只采用累加变量的值,所有关于运行状态的速度调节都映射到累加器的升速和降状态位上,前侧的波动在此环节得到扼制。
2.PID在中断开始运行同时开始运算:
3.在PLC通电后,启动中断和对PID回路表赋值,在运行算不对其回路表采样,增益,积分,微分参数进行更改,PID和中断一直保持平稳运行,不进行状态更改。
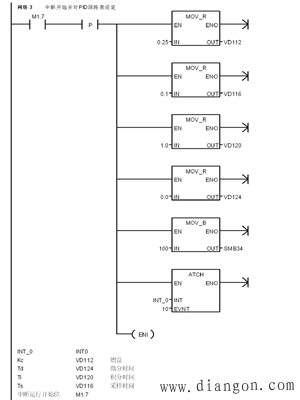
4.转速最终输出只采用累加变量的值,所有关于运行状态的速度调节都映射到累加器的升速和降速状态位上,前侧的波动在此环节得到扼制。
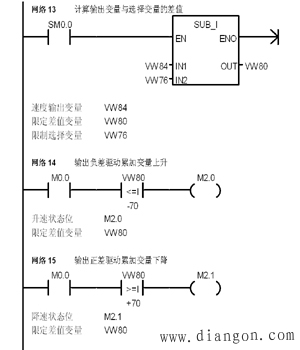
5.通过对已输出转速变量值与应输出转速变量值的差值运算,并通过对运算值的比较,将对转速的调速转化为扼制环节的上升,下降,保持的状态位:
6.开环状态控制和闭环状态控制的转换段:
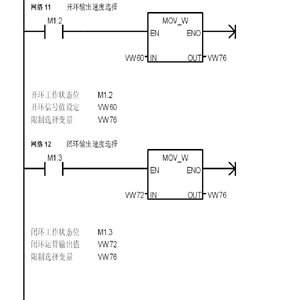
7.多操作源切换:
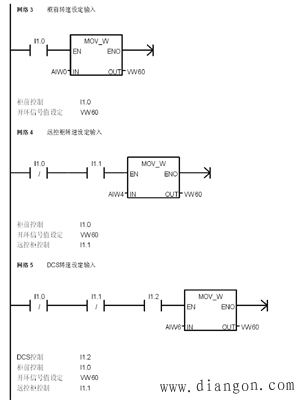
8.实际应用
2005年,东莞糖业1600KW引风机上应用,总结特点如下:
(1)信号给定、输出与现场工业接口相互匹配。
(2)可以实现多信号源给定的无扰动相互切换。
(3)在调试中,通过观测扼制环节就明了速度调节流程,减轻了调试程序的工作量。
(4)速度的上升率和下降率通过累加环节调整,对PID环节设定限制要求降低,大大减轻了闭环PID设定时的计算和测试工作量。
六、结束语
在电力电子系统中,硬件是设备的身体,软件是设备的灵魂。在自动化程度越来越先进的工业环境中,其应用的设备容量越来越大,对其的安全性,稳定性,易操作性都提出了更高的要求。一个设计思想明确,结构合理,运行稳定的驱动软件,不仅可以加快设备初期调试的速度,操作人员的劳动强度,还能保障设备长期平稳运行,在各种状况下不出现危及设备运行安全的波动。