智能移动机器人控制系统的设计与开发主要采用模块化组合设计,采用ATMEL公司的ATMEGA16单片机芯片,同时配合ICCAVR7.01软件开发环境,支持C语言的程序设计。
智能移动机器人硬件主要由直流电机驱动模块、发生器模块、串口通信模块以及无线遥控、循线、寻光、避章等模块组成。
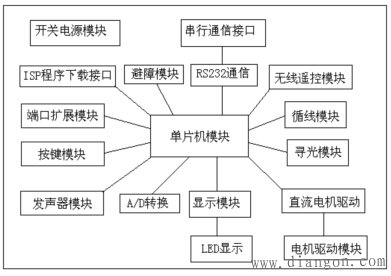
图1 智能移动机器人控制系统硬件框图
其主要功能为:
① 红外遥控功能
红外通信采用38K载波传输方式,利用长虹电视机遥控器作为红外遥控的发射装置,利用串口以及串口调试助手,找出遥控器控制键(前进、后退、左转、右转以及停止)的编码,通过编程实现控制。
② 避障功能
由红外发送和接收装置两大部分组成,可以实现自发自收,也可以实现实验板之间的通信。发送部分发送红外载波,若前面没有障碍物,接受部分不能收到载波,若前面有障碍物,载波将返回被接受模块接受,于是通过接受模块判断是否收到载波就可以判断前面是否有障碍物
③ 循线功能
由5路反射式红外光电传感器组成,检测距离可调整范围大,4-10mm范围可用。
④ 寻光功能
主要采用灵敏度较高的光敏电阻,通过LM393将信号放大,返回主控模块。
2.红外遥控功能
① 红外遥控工作原理

图2 无线遥控系统框图
通常红外遥控系统由发射和接收两大部分组成。主要应用编/解码专用集成电路芯片来进行操作控制。发射部分由键盘矩阵、编码调制、LED红外发送器组成;接受部分由光、电转换放大电路、解调以及解码电路组成(如图2所示)。在本实验中,接受装置采用TL538B专用集成芯片,发射装置采用长虹电视机遥控器(RK23C)。
② 遥控信号发射
当发射器按下按键后,即有遥控码发出,所按的键不同遥控编码也就不同,这种遥控码主要具有以下特征:
采用脉宽调制的串行码,以脉宽为0.565ms、间隔为0.56 ms、周期为1.125 ms的组合表示二进制的“0”;以脉宽为0.565ms、间隔为1. 685 ms、周期为2. 25 ms的组合表示二进制的“1”,其波形如图3所示。
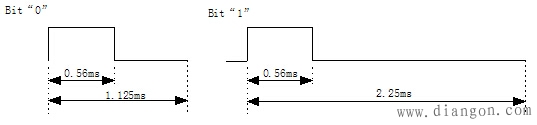
图3 遥控码的“0”和“1”
上述的“0”和“1”组成的32位二进制码经38kHZ的载频进行二次调制以提高发射效率,达到降低电源功耗的目的,然后再通过红外发射二极管产生红外线向外界空间发射,如图4所示。遥控编码产生的是32位二进制编码,其中前16位是用户识别码,能区别不同的电器设备,防止不同机种遥控码互相干扰,后16位为8位操作码(功能码)及其反码。
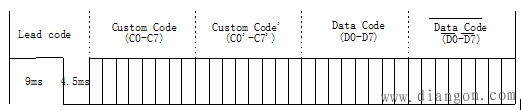
图4 红外发射编码图
遥控器在按键按下后,周期性地发出同一种32位二进制码,周期大约为108ms,一组码本身的持续时间随它包含的二进制“0”“1”的个数不同而不同,大约在45~63ms之间,图5为发射波形图。
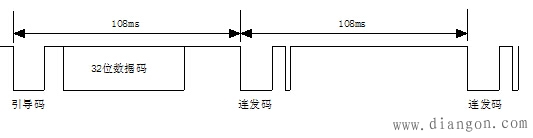
图5 遥控连发信号波形
当一个按键被按下超过36ms,振荡器使芯片激活,将发射一组108ms的编码脉冲,这108ms发射代码由一个引导码(9ms)、结果码(4.5ms)、低8位地址码(9ms~18ms)、高8位地址码(9ms~18ms)、8位数据码(9ms~18ms)和这8位数据的反码(9ms~18ms)组成,如果按下超过108ms仍未松开,接下来发射的代码(连续码)将仅由起始码(9ms)和结束码(2.25ms)组成。
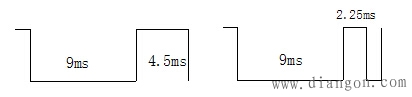
图6 引导码 图7 连发码
③ 遥控信号接受
接受电路使用一种红外接受和放大于一体的红外接受器TL538B,不需要任何外接元件,就能完成从红外线接受到输出与TLL电平信号兼容的所有工作,而体积和普通的塑料封装三极管大小一样,适合于各种红外遥控盒红外数据传输。
④ 红外遥控电路图

图8 TL538B与单片机连接图
⑤ 红外遥控程序流程图
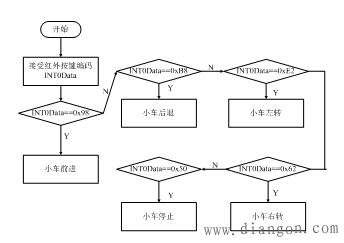
图9 红外遥控程序参考流程图
3.红外避障功能
① 红外避障原理
红外避障传感器具有一对红外信号发射与接收信号装置,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当红外的检测方向遇到障碍物(反射面)时,红外信号反射回来被接收管接收,经过处理之后,通过数字传感器接口返回到机器人主机,机器人即可利用红外波的返回信号来识别周围环境的变化。
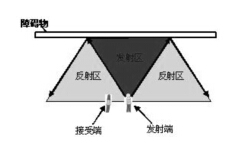
图10 发射接受原理图
红外避障信号发射装置(如图10所示)主要由555定时器和外界元件R1、R2、C3、C2组成的多谐振荡器构成。电路没有稳态,仅存在两个暂稳态,电路也不需要外接触发信号,利用电源通过R1、R2向C3充电,以及C3通过R1向放电端DISCHG放电,使电路产生振荡。www.ippipp.com电容C3在2/3Vcc和1/3Vcc之间充电和放电,从而在输出端得到一系列的矩形波,对应的波形如下图12所示。
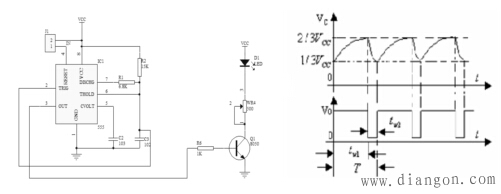
图11 红外发射电路图 图12 多谐振荡器的波形图
输出信号的时间参数是:T=tw1+tw2
tw1=0.7 (R1+R2) C
tw2=0.7R2 C
其中,tw1为Vc由1/3Vcc上升到2/3Vcc所需的时间,tw2为电容C3放电所需的时间。
注:通过调节WR4可调电阻的阻值,可以增大或减短障碍物距离的检测。
② 红外避障程序流程图
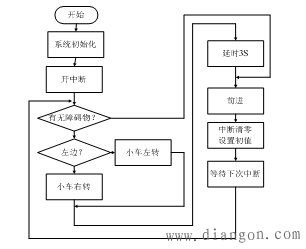
图13 红外避障程序参考流程图
4.循线功能
① 循线原理

(a) (b) (c) (d)
图14 小车循线示意图
一般情况下,选择三个ST178光电传感器,编号分别为A、B、C,如图14所示,B检测到黑线,而A、C没有检测到,那么机器人小车直行;若A 处于黑线上,B、C 在白色区域,那么机器人小车左偏以矫正路线;若C 处于黑线上,A、B 在白色区域,则机器人小车右偏以矫正路线,A 、B 、C 都在黑线上时,机器人小车处于黑线交界处。
② 循线电路图
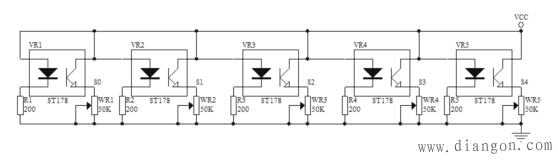
图15 ST178循线电路图
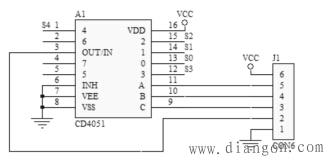
图16 多路通道选择电路图