步进电动机的有关术语:
相数:电动机定子上有磁极,磁极对数为相数,如图1有六个磁极,为三相步进电动机。五相步进电动机则有十个磁极。
拍数:电动机定子绕组每改变一次通电方式,称为一拍。
步距角:转子经过一拍转过的空间角,用符号a表示。
齿距角:转子上齿距在空间的角度。如转子上有N个齿、齿距角=360°/N。
步进电动机由定子和转子组成,定子上的磁极和转子都有齿,定子磁极上的磁宽和磁槽必须和转子上的磁宽和磁槽相等。
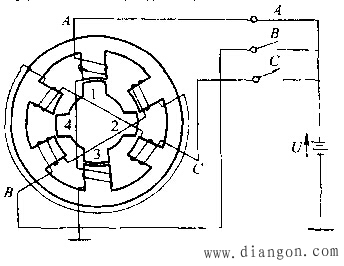
理示意图,它的定子上有6个磁极,极距角为60°、每个磁极都看作是一个齿。每个磁极上都装有控制绕组,形成A、B、C三相绕。转子上均匀地分布着四个齿,每个齿宽与定子磁极极靴的宽度完全一样,齿距角为360°/4=90°。因磁通总是要沿着磁阻最小的路径闭合,所以当某相的绕组例如A相绕组第一个通电时.使转子齿1、3和定子A相磁极对齐,这时电动机的其他两相(B相、C相)的磁极分别和转子上的齿产生一个角度,把它叫作错齿,错齿角是转子齿距角的三分之一,即30°。当A相绕组断电,B相绕组通电时,同样磁通沿着最小磁阻路径闭合、转子逆时针旋转30°,使转子齿2、4与 B相磁极相对齐。此时转子1、3齿和A相、C相产生30°的错齿。若再使B相断电,C相通电,则转子再逆时针旋转30°,使转子齿1、3和C相对齐。若再使C相断,A相通电,则由于仍有错齿,则使2、4齿和A相磁极对齐,转子转了一个齿距角90°,回到了刚开始的状态。如果按这种通电顺序通电,电动机便会按一定的方向转动,这即是反应式步进电动机的基本工作原理。其转速决定于电源通断的变化频率,运转方向决定于电源通断顺序。从上述工作原理可看出,步进电动机能步进旋转的根本原因在于转子齿和每相定子磁极齿错开1/m齿距。对三相步进电机,当转子齿和某相(如A相)对齐时,则和另外两相(B相、C相)分别向前和向后产生l/3的错齿。错齿,实际上就是定子相邻磁极的磁极距所占的齿距数不是整数,如上述转子上有四个齿,齿距角为90°,而相邻磁极的极距角为60°,60°所占的齿距角为2/3,不是整数,结构上的这种错齿才能使步进电动机在电脉冲作用下产生转动。错齿角的大小决定着步距角的大小,步距角小才能提高加工精度。实际中采用的步进电动机转子齿数基本上由步距角的要求决定,齿数多,步矩角少。但为了实现错齿,转子齿数不能为任意值。某一极下若定子和转子齿对齐,则要求应错开转子齿距的1/m (m为相数),转子齿应符合的条件为: z =2 m(k±1/ m)
式中 m-相数,
k-1,2,3,…正整数。
例如三相步进电动机、取转子齿数为40个,上式取z =2 m(k±1/ m),k取7,等式成立。说明转子齿数取40个满足错齿的要求,步进电动机的结构是合理的。
步进电动机的步距角a由下式决定:a=360°/ mzc
式中 z-转子齿数;
m-相数;
c-系数,c=1或2。系数c与步进电动机的通电方式有关。当相邻两拍接通的定子的极数相同时,c=1;不同时,c=2。360°/ mz为定子相对转子错开的齿距角。
步进电动机的转速n(r/min)与通电频率f成正比。即
n=60a°/360°=60f / mzc (r/min)
当步进电动机经过传动比为i (i=z1/z2),驱动丝杠螺距为t的传动系统时,脉冲当量δ(mm/脉冲)为:δ=tai/360°= ti/ mzc
步进电动机相数和齿数越多,步距角越小、脉冲当量也越小。加工精度可以提高,但电源也复杂。目前比较小的步距角常为0.75°,脉冲当量常为0.01mm。常用相数为3相或5相,最多为6相。
步进电动机有单拍、双拍、单双拍几种不同的通电方式,以三相步进电动机为例:
(1)三相单三拍通电方式:每次只有一相通电,按A→B→C→A顺序循环通电。由于每次只有一相通电,在绕组通电切换的瞬间,电动机将失去自锁转矩因而稳定性较差。步距角系数c=l。
(2)三相双三拍通电方式:每次都是同时两相通电、按AB→BC→CA→AB顺序循环通电。由于每次有两相通电,切换时不失去自锁转矩,稳定性较好。步距角系数c=1。
(3)三相单双三拍(六拍)通电方式:即按A→AB→B→BC→C→CA→A顺序通电,仍具有较好的稳定性;同时因转一个齿距是六拍,故步距角是其他两种的一半,即步进角系数c=2。