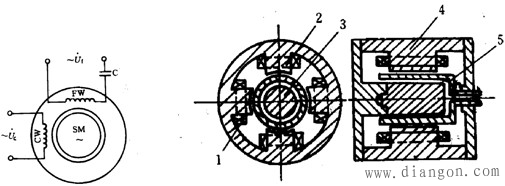
图1 交流伺服电动机接线图 杯形转子伺服电动机结构图
根据伺服系统工作性质的要求,控制电压一旦取消,电动机必须立即停止转动。但众所周知,单相异步电动机一旦转动以后,即使取消控制电压,仅靠励磁电压单相供电也会继续转动,即存在“自转”现象,这意味着失去控制作用,是不允许的,因而交流伺服电机必须解决“自转”问题。
从三相异步电动机的特性可知,转子电阻值对电动机的机械特性有较大的影响,如图5-4所示。当转子阻值增大到一定程度,例如图中
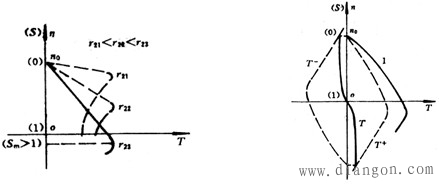
图2中曲线1为有控制电压时伺服电机的机械特性曲线,曲线
增大伺服电机转子阻值