步进电机控制系统结构如下,通过单片机或是计算机等发送控制命令给电机驱动器,电机驱动器将控制命令转化为驱动信号给执行电机。
步进驱动控制面板的右侧为面板和步进电机面板的接口,包含步进电机的驱动信号,左侧为与运动控制器的接口,包含方向和脉冲等控制信号接口。
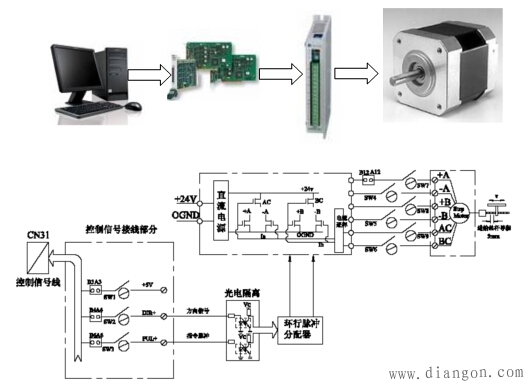
+A,-A, +B,-B,AC,BC信号为步进电机的电源线,用于驱动电机的运动。
+5V,PUL+,DIR+为与控制器相连的控制信号。
其含义为:
+5V为电源。
PUL+为脉冲信号,用于位置模式下的电机控制。
DIR+为方向信号,用于位置模式下的电机控制。
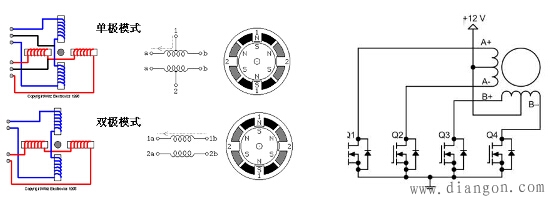
步进电机结构如下,单极性 (unipolar) 和双极性 (bipolar) 是步进电机最常采用的两种驱动架构。单极性驱动电路使用四颗晶体管来驱动步进电机的两组相位,电机包含两组带有中间抽头的线圈,整个电机共有六条线与外界连接。这类电机有时又称为四相电机或应是双相位六线式步进电机。六线式步进电机虽又称为单极性步进电机,实际上却能同时使用单极性或双极性驱动电路。
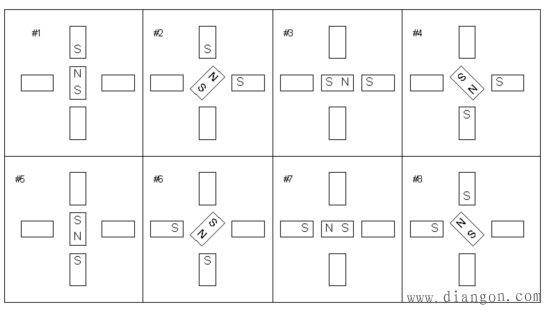
单极半步运行的原理如下,通过驱动器控制电机线路,在相应的位置产生如下的磁场,驱动电机一步一步的运动。
步进电机一般用于开环伺服系统,由于没有位置反馈环节,固位置控制的精度由步进电机和进给丝杠等等来决定。虽档次低,但是结构简单价格较低。在要求不高的场合仍有广泛应用。在数控机床领域中大功率的步进电机一般用在进给运动(工作台)控制上,但是就控制性能来说其特性不如交流伺服电机。振动、噪音也比较大。尤其是在过载情况下,步进电机会产生失步,严重影响加工精度,但其便宜的价格,方便使用的特点,在工业中的达广泛的应用。