控制要求示意图:
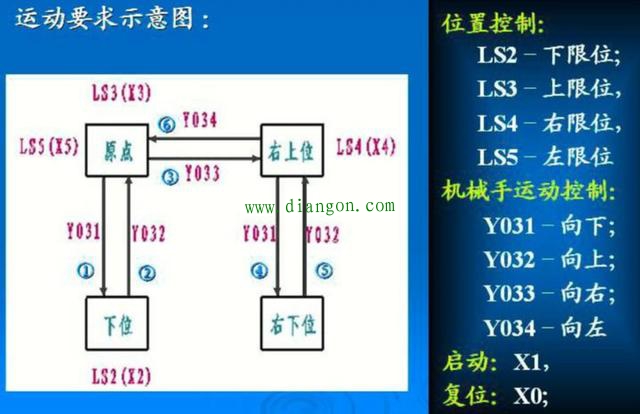
当按下启动按钮X1后,机械手先向下移动再向上移动,然后向右移动再向右下移动,再向右上移动,再回到原点。(我们可以想像成一个机械手抓持着一个工件,把工件从一个位置移动到另一个位置)。
I/O分配表:
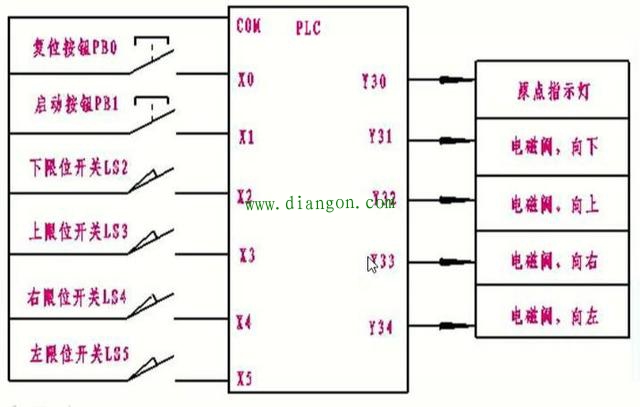
首先我们先把输入与输出的分配给编好。
流程图:
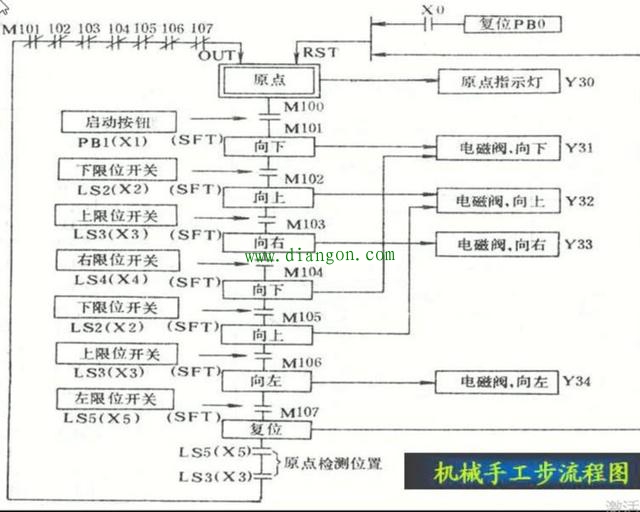
像设计这种带有步进顺控指令的电路,我们可以先画一个流程图以方便我们一步步的分析与设计电路。首先机械手从原点开始先向下——向上——向右——右下——右上——向左——复位。然后步与步之间的转换条件我们可以设置成各个限位开关,然后我们通过移位指令把M101到M107的各个指令一步步激活。
梯形图:
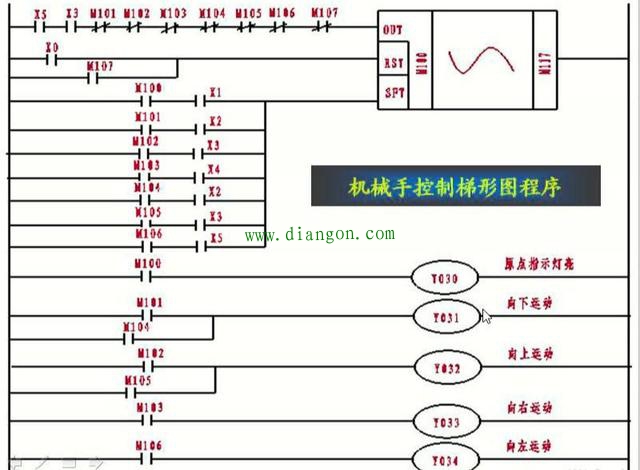
当我们在启动前机械手位于原点位置,X5(左限位开关),X3(右限位开关)是被压合的,就会传输一个1到M100里面去,然后M100的常开触点闭合,按下启动按钮X1,M100的数据通过移位指令移到M101里面去,机械手向下运动,当碰到下限位开关X2后,M101的数据通过移位指令移到M102里面去,机械手向上运动,当碰到上限位开关X3后,M102的数据通过移位指令移动到M103里面去,机械手向右运动,,,,,,以此类推,一直到M107复位指令。如果我们想让机械手直接复位也可以按下X0复位按钮,这样机械手就可直接复位。