通讯线TK-Q 编程线USB-QC30R2
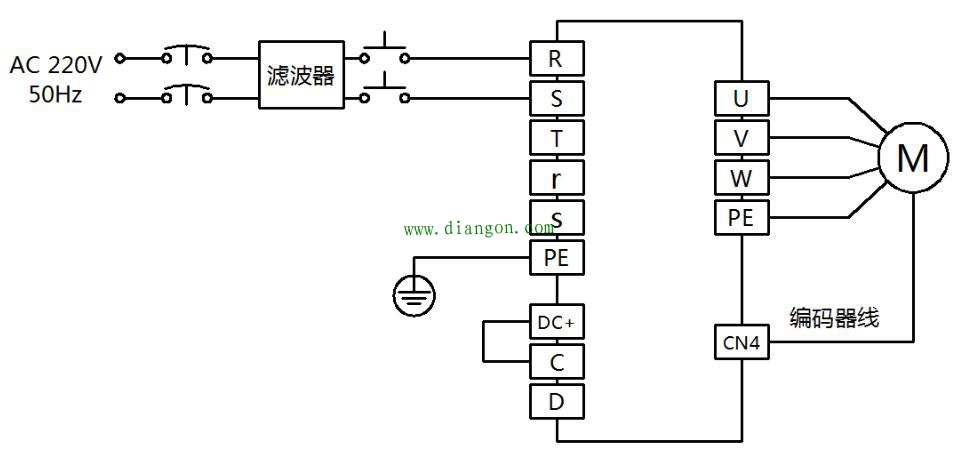
1、伺服电机接线
(1) 驱动器主电路端子名称
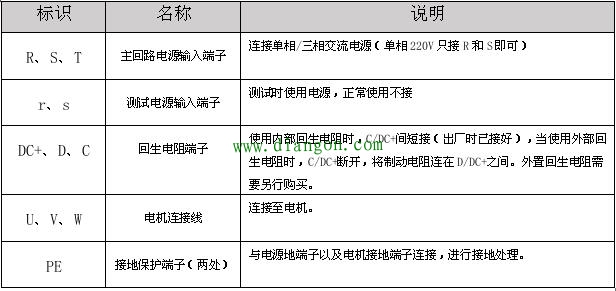
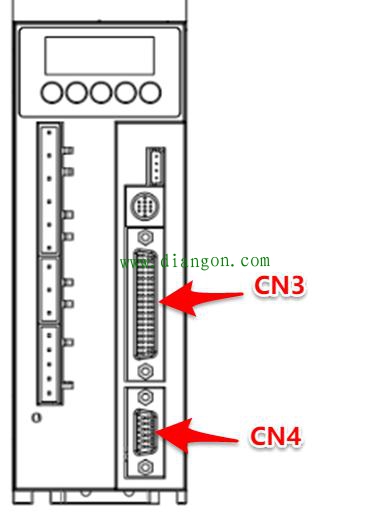
(3)伺服驱动器面板
(4)位置控制模式接线
CN3端子
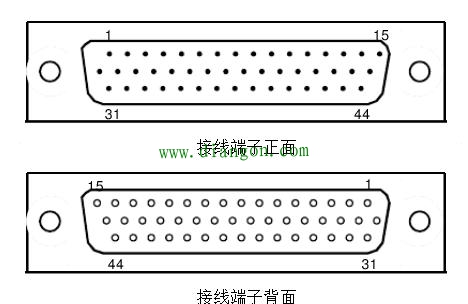
CN3端子定义

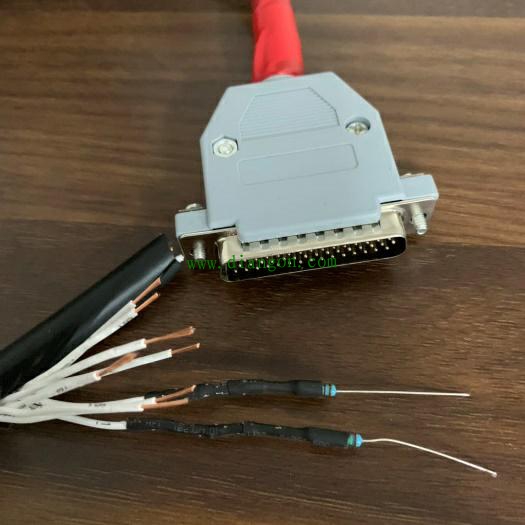
位置控制所需的控制端子如上图所示,针脚号1、针脚号2需要接100Ω电阻。

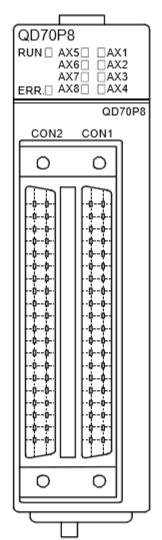
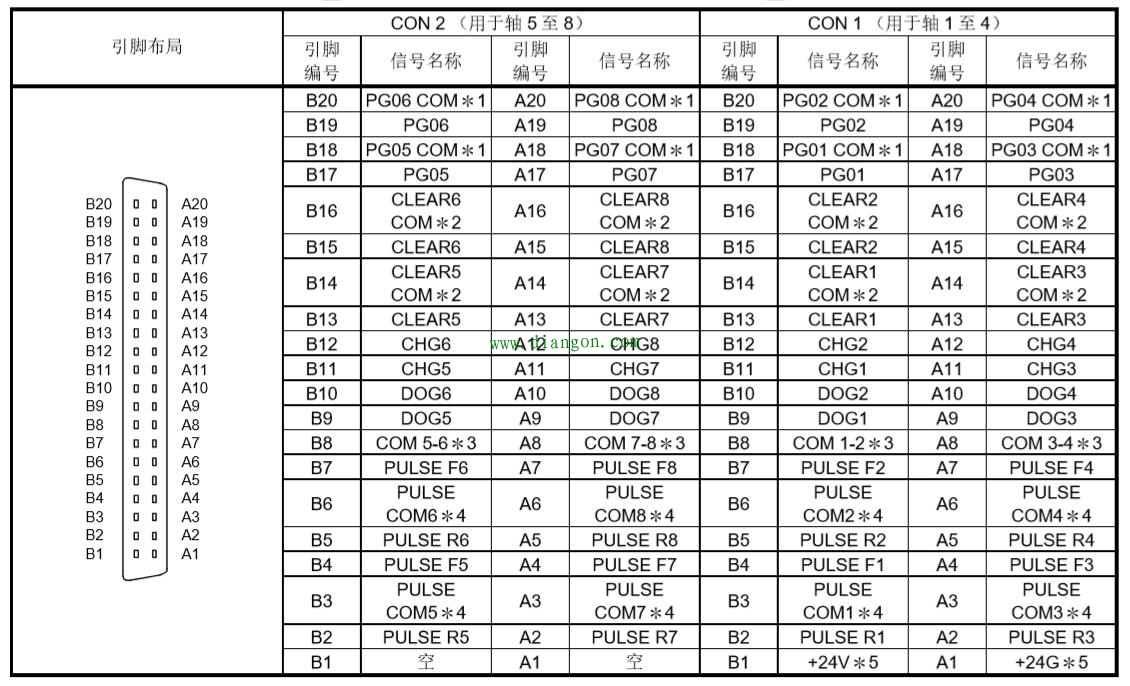
三菱QD70P8模块端子定义
伺服驱动器与三菱plc接线

注:引脚5和引脚22接输出Y,可以根据自己实际需要更改输出端子
PLC参数设置
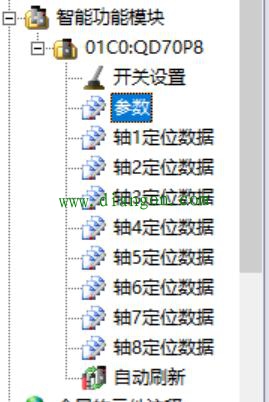
轴1定位数据:选择定位结束,INC就是相对位置控制,其他参数可以根据自己需要设置,这里可以默认。

参数设置:一般直接默认设置就可以。

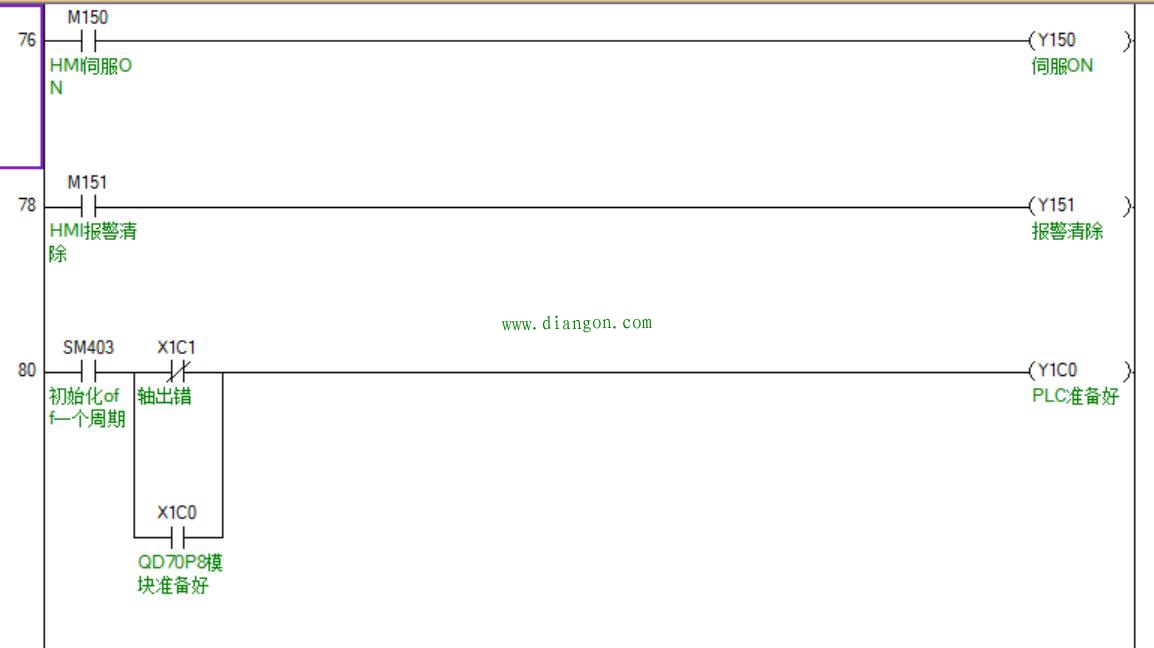
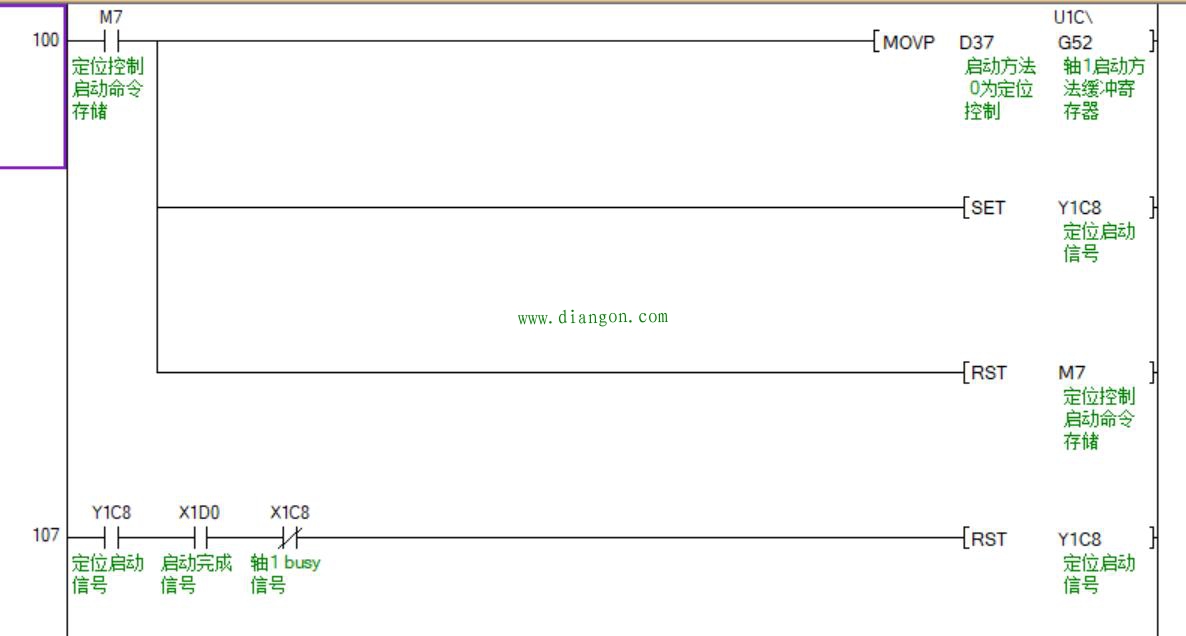
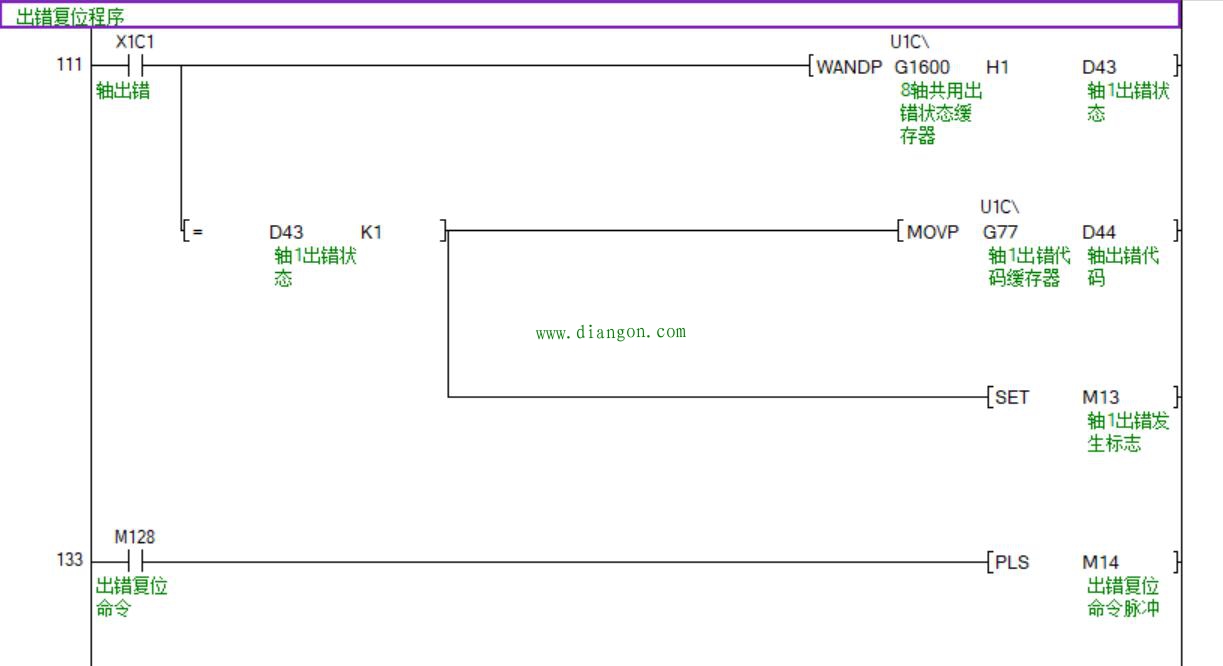
2、PLC程序
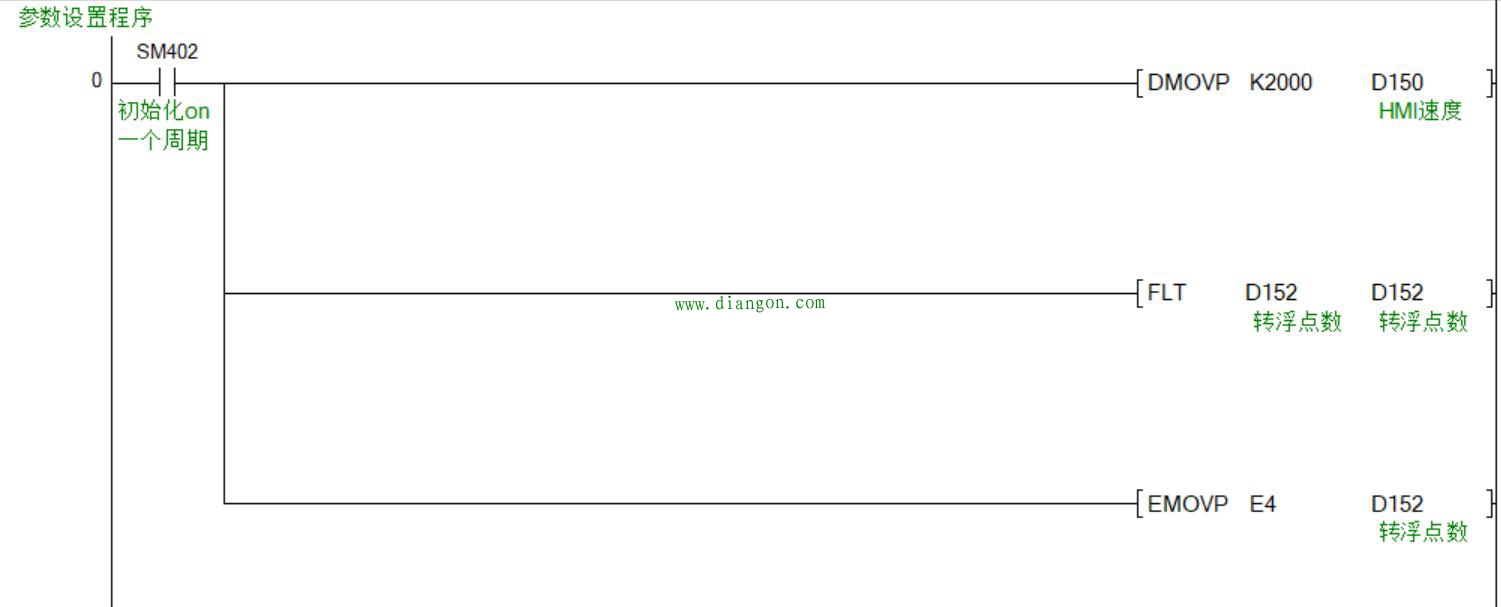
初始化设置先设置速度为2000,后面在人机界面可以自己调整
脉冲数转换:电机走一圈用的模组走5mm的距离
电机走一圈脉冲10000pulse,因此人机界面输入1mm,需要2000脉冲,距离是浮点数,因此需要用到浮点数相关指令。
ü FLT D152 D152将整型D152转换为浮点数
ü EMOVP E4 D152浮点数赋值
ü E* D152 E2000 D154 浮点数相乘
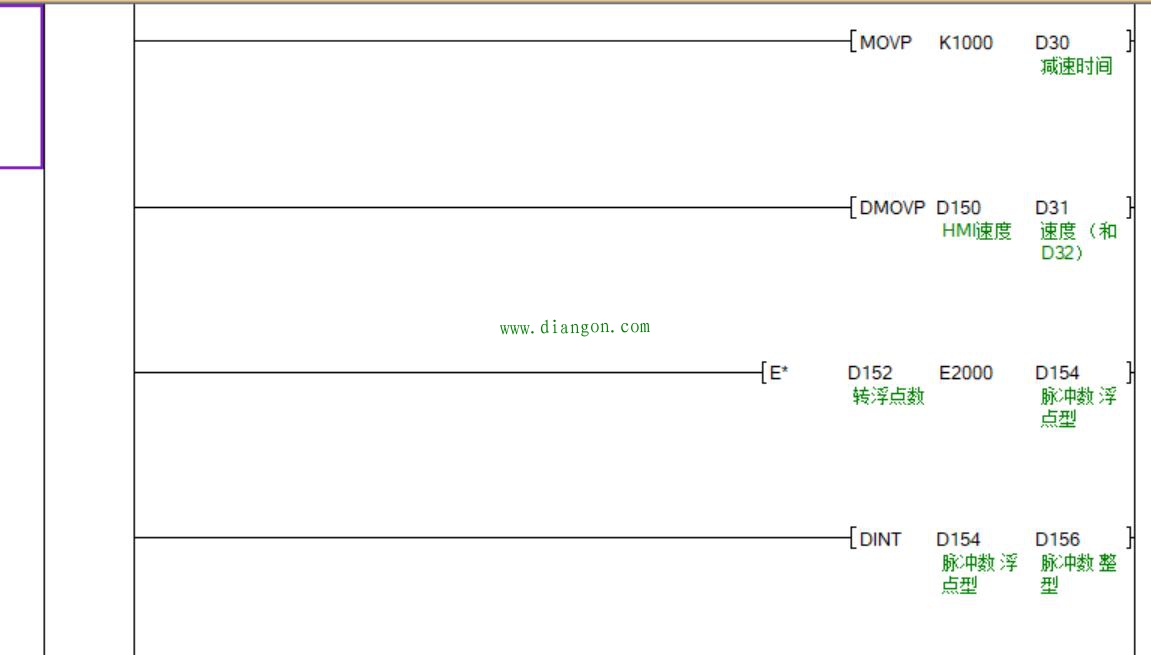
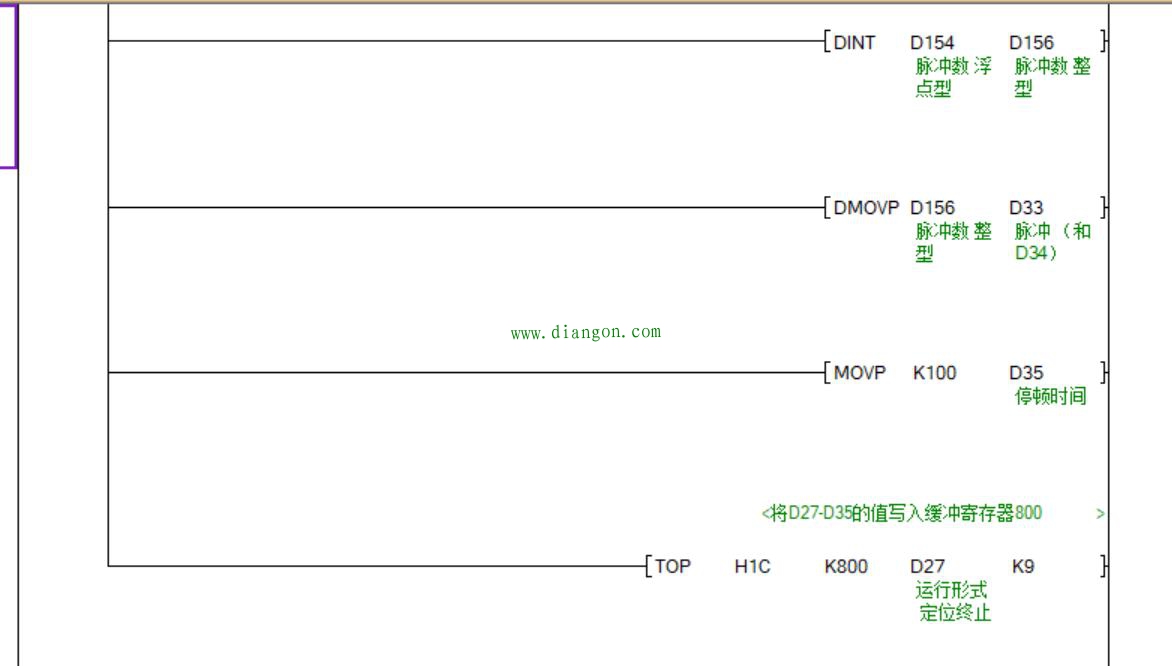
ü DINT D154 D156浮点数转为D156
ü TOP H1C K800 D27 K9
将D27开始的9个数据寄存器的数值存入模块的缓冲寄存器中,当模块安装在基板槽口0时,则选择H00,我是安装在第8槽口,输入输出从X1C0,Y1C0开始,因此为H1C,K800是轴1的缓冲数据寄存器,轴2为k900,以此类推,可接8个轴。
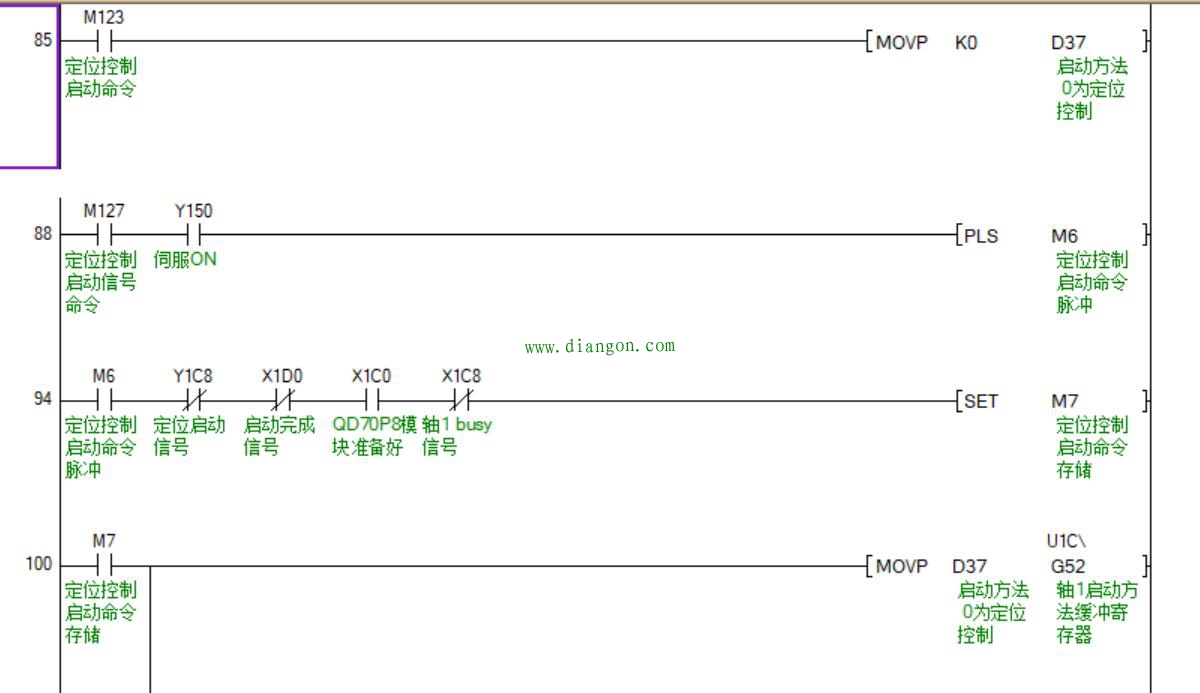
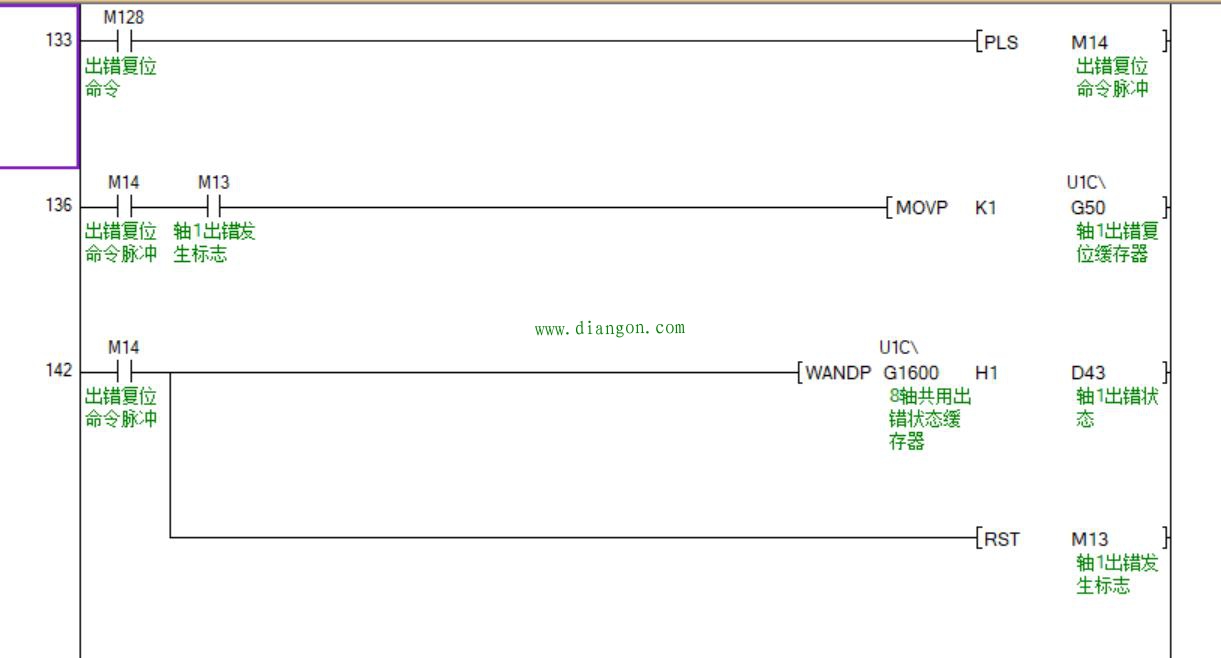
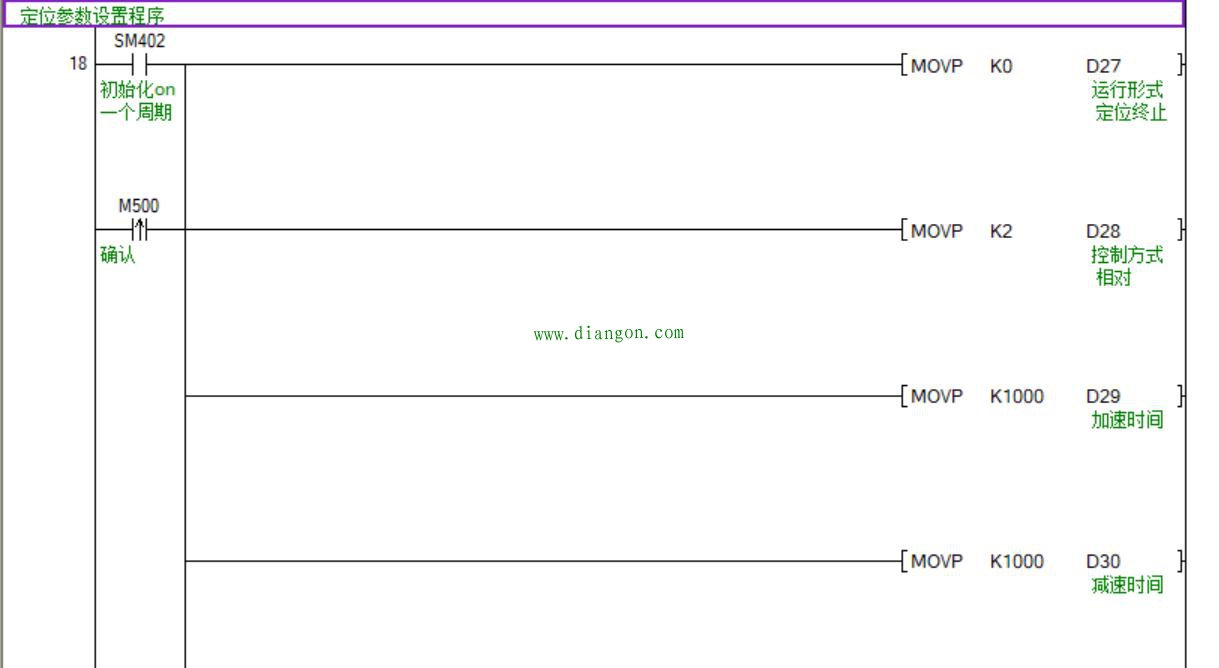
注意:程序中,运行形式和控制方式一定要写入,否则将报错。定位形式0,控制形式为2。

3、hmi对应程序
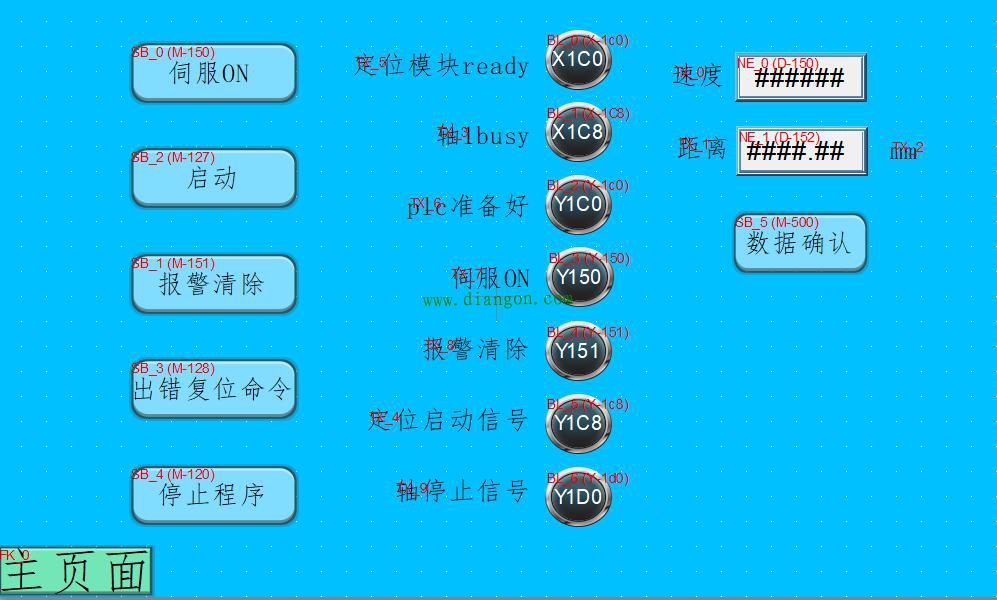
工作过程:在速度、距离中输入数据,电机数据确认按钮,开启伺服ON按钮,锁住电机,再按下启动按钮,电机将按照设定的距离和速度动作。当电机出错,查找原因并按下报警清除按钮,清除报警。