三相异步电动机的定子铁心线槽嵌放着三相对称绕组U1—U2、V1—V2、W1—W2。转子是一个闭合的多相绕组笼型电机。图7为异步电动机的工作原理图。图中定、转子上的小圆圈表示定子绕组与转子导体。当定子绕组接入三相交流电源时,流入定子绕组的三相对称电流在电动机的气隙内产生一个以同步转速![]() 旋转的磁场。转子导体嵌放在转子铁心槽内,两端被导电环短接。当旋转磁场以顺时针方向旋转时,转子导体切割磁力线产生感应电动势,其方向用右手定则来判别,如图所示。转子上半部异体中的电动势方向都是穿出纸面,用“
旋转的磁场。转子导体嵌放在转子铁心槽内,两端被导电环短接。当旋转磁场以顺时针方向旋转时,转子导体切割磁力线产生感应电动势,其方向用右手定则来判别,如图所示。转子上半部异体中的电动势方向都是穿出纸面,用“![]() ”表示,下半部导体中的电动势方向都是进入纸面,用“
”表示,下半部导体中的电动势方向都是进入纸面,用“![]() ”表示。在转子回路闭合的情况下,转子导体中就有电流流过。如不考虑转子绕组电感,那么电流的方向与电动势的方向相同。
”表示。在转子回路闭合的情况下,转子导体中就有电流流过。如不考虑转子绕组电感,那么电流的方向与电动势的方向相同。
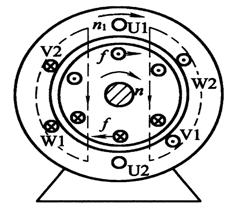
图异步电动机的工作原理
转子载流导体在旋转磁场中将受到电磁力的作用,导体所受到电磁力的方向可用左手定则来判断,如图所示。转子上各导条都受到顺时针方向的力,这些力对转子以顺时针方向旋转,其转速为![]() ,与旋转磁场方向相同。由于转子导体电流是通过电磁感应产生的,所以也可以把这种电动机称作感应电动机。
,与旋转磁场方向相同。由于转子导体电流是通过电磁感应产生的,所以也可以把这种电动机称作感应电动机。
在正常情况下,异步电动机的转子转速不能达到旋转磁场的转速,这是因为转子导体在![]() =
=![]() 时不切割定子旋转磁场,转子中就没有感应电动势及电流,也就不产生转矩,因此转子转速与定子旋转磁场的转速两者步伐不可能一致,所以称为异步电动机。例如四极异步电动机的同步转速
时不切割定子旋转磁场,转子中就没有感应电动势及电流,也就不产生转矩,因此转子转速与定子旋转磁场的转速两者步伐不可能一致,所以称为异步电动机。例如四极异步电动机的同步转速![]() =1500r/min,在额定负载时,它的转速约为1400r/min。
=1500r/min,在额定负载时,它的转速约为1400r/min。
通常我们将同步转速![]() 与转子转速
与转子转速![]() 之差对同步转速
之差对同步转速![]() 之比称为转差率,式1,用s表示。即
之比称为转差率,式1,用s表示。即
![]() (1)
(1)
转差率![]() 是异步电动机的一个基本物理量。反映异步电动机的各种运行情况。电动机启动时,
是异步电动机的一个基本物理量。反映异步电动机的各种运行情况。电动机启动时,![]() =0,转差率s=1。理想空载转矩下,
=0,转差率s=1。理想空载转矩下,![]() =
=![]() ,则s=0。转子转速越高,转差率越小。通常异步电动机额定负载时的转差率在通常在0.01~0.06之间。即异步电动机的转速很接近同步转速。
,则s=0。转子转速越高,转差率越小。通常异步电动机额定负载时的转差率在通常在0.01~0.06之间。即异步电动机的转速很接近同步转速。