1、引言
温度控制系统是变参数、有时滞和随机干扰的动态系统,为达到满意的控制效果,具有许多控制方法。故对几种常见的控制方法及其优缺点进行了分析与比较。
2、常见温度控制方法
2.1 常规PID控制
PID控制即比例、积分、微分控制,其结构简单实用,常用于工业生产领域。原理如图1。

图1 常见PID控制系统的原理框图
明显缺点是现场PID参数整定麻烦,易受外界干扰,对于滞后大的过程控制,调节时间过长。其控制算法需要预先建立模型,对系统动态特性的影响很难归并到模型中。
在我国大多数PID调节器厂家生产的调节器均为常规PID控制算法。 2.2 模糊控制
模糊控制(Fuzzy Control)是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机控制。原理如图2。

图2 模糊控制系统原理框图
2.3 神经网络控制
神经网络控制采用数理模型的方法模拟生物神经细胞结构,用简单处理单元连接形成各种复杂网络,并采用误差反向传播算法(BP)。原理如图3:
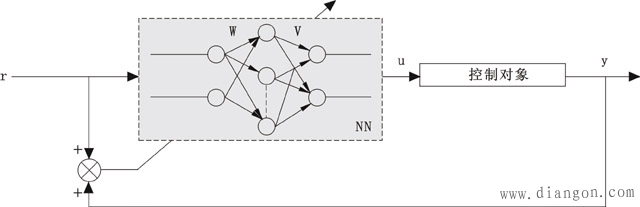
图3 神经网络控制系统的原理框图
2.4 Fuzzy-PID控制
模糊控制不需知道被控对象的精确模型,易于控制不确定对象和非线性对象。PID本质是线性控制。将模糊控制与PID结合多,以Fuzzy-PID混合控制为例,据给定值与测量值之偏差e选择智能控制器,根据e的变化选择控制方法,当|e|≤emin或|e|≥emax时,采用PID控制;当emin≤|e|≤emax时,采用Fuzzy控制。其结构框图如图4。

图4 Fuzzy-PID混合控制结构框图
2.5 神经网络PID控制
在PID控制的基础上,加入神经网络控制器,构成神经网络PID控制器,如图5。神经网络控制器NNC是前馈控制器,通过对PID控制器的输出进行学习,在线调整自己,目标是使反馈误差e(t) 或u(t)趋近于零,使自己逐渐在控制中占据主导地位,以减弱或最终消除反馈控制器的作用。

图5 神经网络PID控制结构框图
2.6 模糊神经网络控制
将模糊逻辑与神经网络结合,采用神经网络模糊逻辑推理网络模型和快速的自学习算法,通过网络的离线训练和在线自学习使控制器具有自调整、自学习和自适应能力,达到模糊智能控制。如图6。
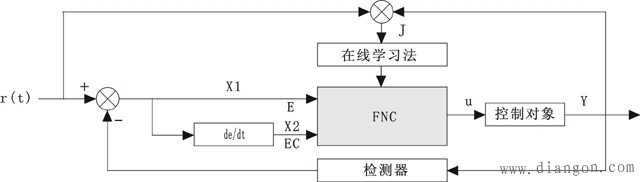
图6 模糊神经网络控制系统结构图
2.7 遗传PID控制
遗传PID控制是将控制器参数构成基因型,将性能指标构成相应的适应度,利用遗传算法来整定控制器的最佳参数,不要求系统是否为连续可调,能否以显式表示。基于遗传算法的自适应PID控制的原理框图如7。遗传PID温控系统将测量值与给定值进行比较,用遗传算法来优化PID参数,然后将控制量输出,实现将PID参数串接构成完整染色体,从而构成遗传空间中的个体,过通过繁殖交叉和变异遗传操作生成新一代群体,经过多次搜索获得最大适应度值的个体。
图7 基于遗传算法的自适应PID控制结构图
2.8 广义预测控制
预测控制(Predictive Control)是基于模型的计算机控制算法。其预测模型有脉冲响应模型、阶跃响应模型、CAMRMA模型和CARIMA模型。基于CARIMA模型的广义预测控制(GPC)是一种新型计算机控制算法。
3、常见温度控制方法的对比分析
通过上述温度控制方法的原理分析,表1给出各种温度控制特性与应用场合的情况。
|
温控仪控制算法 |
控制算法的控制特性 |
温控仪应用场合 | |
|
单 |
常规PID拄制 |
优点:结构简单、实用,性价比高。 |
易于建立的线性温度控制系统的被控对 |
|
模糊控制 |
与传统的PID控制相比,响应快,超 |
纯滞后,参数时变或非线性的温度控制 | |
|
神经网络控制 |
鲁棒性强,响应速度快,抗干扰能力 |
多变量、多参数、非线性与时变系统 | |
|
复 |
Fuzzy-PID控制 |
具有很强的适应性,只要知道部分知识 |
一些大滞后系统中自动寻优P、I、D参 |
|
模糊神经网络控制 |
动态响应快,能达到高精度的快速控制, |
需要不断修正控制参数的温度控制系统。 | |
|
遗传PID控制 |
调试方便,控制精度高,抗干扰性强, |
寻求全局最优且不需任何初始信息的P、 | |
|
自适应广义预测 |
鲁棒性强,控制精度高 |
医用温度控制,如微波热疗中的 温度 | |
|
模糊、神经网络 |
模糊控制鲁棒性强。动态响应与上升时 |
具有较太的滞后性,非线性、时定性的 | |
|
模糊、神经网络 |
实现温度随外界干扰条件的乏化,实时的 |
对升温速度和恒温过程的精度要求较高 | |
将线性与非线性控制相结合。使温度能满足用户的精度要求是温控系统的最终目的。在实际应用中,根据具体的应用场合、不同的加热对象、不同的控制要求和控制精度,选择不同的控制方式。