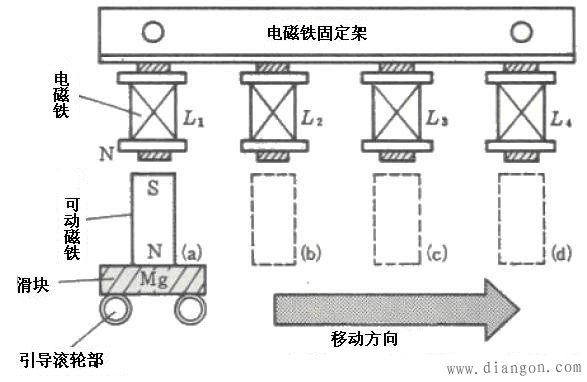
图1 直线型步进电机驱动原理
如此,在此对步进电动机的动作顺道追加说明,现在,电磁铁L1和可动磁铁Mg之间相互作用产生的磁气吸引力,因而在这里场合,(a)部的位置滑动部产生静止作用,其次是电磁铁L2激磁时,刚才的电磁铁L1 OFF,由于如此可动磁铁就被吸引附在电磁铁L2的位置上,就成为在(b)的位置上,更进一步的在电磁铁L3受激磁时,刚才的电磁铁L2 OFF,由于如此可动磁铁就移动至电磁铁L3的位置为止,就成为在(c)的位置上。
以下,依照这各动作而反复的操作,可动磁铁就会向箭头方向移动,因而,依照像这种动作顺次的操作下,可以实现出一种致动器(在此为直线运动),还有,在此所使用的电磁铁L1~L4,在任何可动磁铁(Mg)侧上,都以产生N极的电流流通。
而且,在此所说的构造图并不是只能有4个电磁铁而已,在必要上也可增加它的对应数。
图1的电机为直线型运动,总之就是属于线性步进电机,因而,就如这样并不能成为转型的情况,如此,为了要成为转型就必须下些功夫,图2为了要使刚才线性型的构造成为旋转型的总结,所以它的驱动原理在本质上和刚才的直线运动型一样。
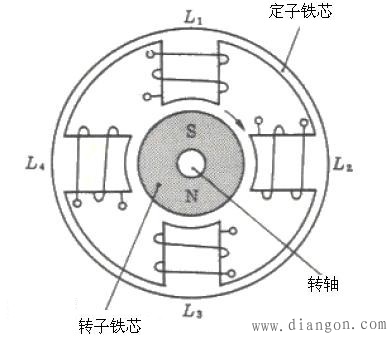
图2 作为转构造的产品